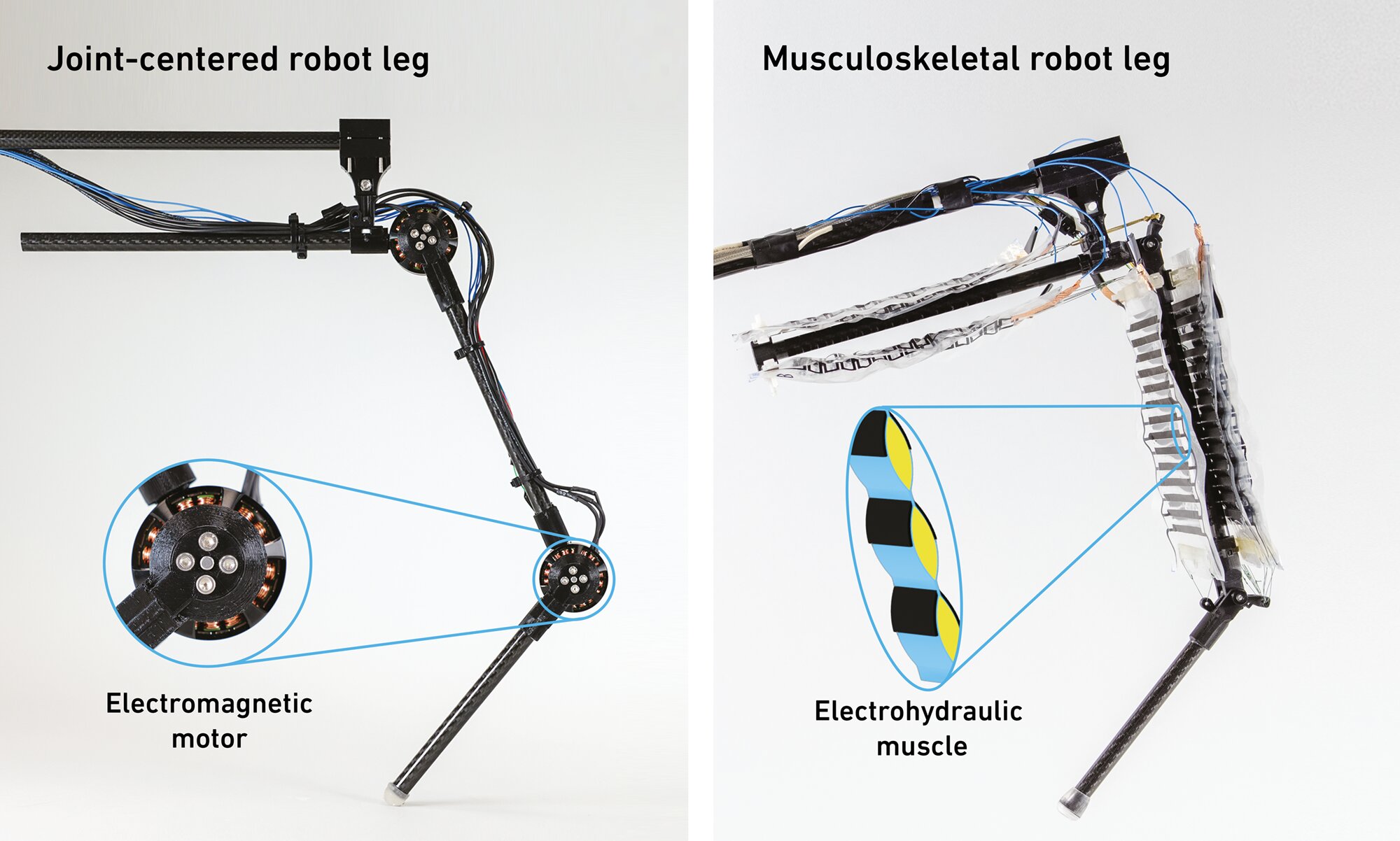
, for their musculoskeletal system the researchers use electrohydraulic actuators – i.e. artificial muscles (right). Credit: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS")
發明家和研究人員開發機器人已有近 70 年的歷史。迄今為止,他們製造的所有機器——無論是為工廠還是其他地方——都有一個共同點:它們都由馬達提供動力,而這項技術已有 200 年的歷史。即使是行走機器人,其手臂和腿也由馬達驅動,而不是像人類和動物那樣由肌肉驅動。這在一定程度上說明了為什麼它們缺乏生物的移動性和適應性。
一種新型的肌肉驅動機械腿不僅比傳統機械腿更節能,還可以進行跳高和快速運動,以及檢測障礙物並做出反應——所有這些都不需要複雜的感測器。這條新腿是由蘇黎世聯邦理工學院和馬克斯普朗克智慧系統研究所 (MPI-IS) 的研究人員在馬克斯普朗克 ETH 學習系統中心 (CLS) 的研究合作夥伴關係下開發的。
CLS 團隊由蘇黎世聯邦理工學院的 Robert Katzschmann 和 MPI-IS 的 Christoph Keplinger 領導。他們的博士生 Thomas Buchner 和 Toshihiko Fukushima 是團隊論文的共同第一作者出版品受動物啟發的肌肉骨骼機器人腿自然通訊。
像氣球一樣帶電
與人類和動物一樣,伸肌和屈肌確保機器人腿可以雙向移動。這些電動液壓執行器被研究人員稱為 HASEL,透過肌腱連接到骨骼。
執行器是充滿油的塑膠袋,類似於用於製作冰塊的塑膠袋。每個袋子的大約一半的兩側都塗有由導電材料製成的黑色電極。
布赫納解釋說:“一旦我們向電極施加電壓,它們就會因靜電而相互吸引。同樣,當我用氣球摩擦頭部時,由於同樣的靜電,我的頭髮會粘在氣球上。 ”
隨著電壓的增加,電極會靠得更近,並將袋子中的油推到一側,使袋子整體變短。
連接到骨骼上的成對致動器會產生與生物體相同的成對肌肉運動。當一塊肌肉縮短時,另一塊肌肉就會延長。研究人員使用與高壓放大器通訊的電腦程式碼來控制哪些執行器收縮和伸展。

比電動機更有效率
研究人員將他們的機械腿的能源效率與由電動馬達驅動的傳統機械腿的能源效率進行了比較。除此之外,他們還分析了有多少能量被不必要地轉化為熱。
「關於紅外線影像,很容易看出,如果機動腿必須保持彎曲位置,它會消耗更多的能量,」布赫納說。
相比之下,電動液壓支架的溫度保持不變。這是因為人造肌肉是靜電的。
「這就像氣球和頭髮的例子,頭髮在氣球上停留了很長一段時間,」布赫納補充道。
「通常,由電動馬達驅動的機器人需要熱管理,這需要額外的散熱器或風扇將熱量擴散到空氣中。我們的系統不需要它們,」福島說。
在不平坦的地形上靈活移動
機器腿的跳躍能力是基於其爆發性提升自身重量的能力。研究人員還表明,機械腿具有高度的適應性,這對於軟體機器人尤其重要。只有肌肉骨骼系統具有足夠的彈性,才能靈活地適應地形。
「這對生物來說沒有什麼不同。例如,如果我們不能彎曲膝蓋,在不平坦的表面上行走就會變得更加困難,」卡茨施曼說。“想像一下從人行道上走下來,走上馬路。”
. Over time, energy is lost in the form of heat. In contrast, the artificial muscles (right), which work on the principle of electrostatics and are efficient, remain cold, because no current flows through them under a constant load. Credit: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS")
與需要感測器不斷指示機械腿角度的電動馬達相比,人造肌肉透過與環境的相互作用來適應合適的位置。這僅由兩個輸入訊號驅動:一個用於彎曲關節,另一個用於伸展關節。
福島解釋說:「適應地形是一個關鍵方面。當一個人跳到空中落地時,他們不必提前考慮膝蓋應該彎曲90度還是70度」。同樣的原理也適用於機器人腿的肌肉骨骼系統。著陸時,腿部關節會根據表面是硬還是軟自適應地移動到適當的角度。
新興科技開啟了新的可能性
電液執行器的研究領域還很年輕,大約在六年前才出現。
「機器人領域在先進控制和機器學習方面正在取得快速進展;相比之下,同樣重要的機器人硬體方面的進展則要少得多。這份出版物有力地提醒我們,引入顛覆性創新的潛力有多大。
Katzschmann 補充說,電動液壓執行器不太可能用於建築工地的重型機械,但它們確實比標準電動馬達具有特定的優勢。這在夾具等應用中尤其明顯,其中的運動必須根據被抓取的物體是球、雞蛋還是西紅柿進行高度客製化。
卡茨施曼確實有一個保留:「與具有電動機,我們的系統仍然有限。這條腿目前連接在一根桿上,會不停地跳來跳去,還不能自由移動。
未來的工作應該克服這些限制,為開發具有人造肌肉的真正步行機器人打開大門。他進一步闡述:“如果我們將機械腿與四足機器人或兩條腿的人形機器人結合起來,也許有一天,當它由電池供電時,我們可以將其部署為救援機器人。”
更多資訊:電動液壓肌肉骨骼機器人腿可實現敏捷、適應性且節能的運動,自然通訊(2024)。DOI:10.1038/s41467-024-51568-3
引文:由人造肌肉驅動的機器人腿優於傳統設計(2024 年 9 月 9 日)檢索日期:2024 年 9 月 9 日取自 https://techxplore.com/news/2024-09-robot-leg-powered-artificial-muscles.html
本文檔受版權保護。除了出於私人學習或研究目的的任何公平交易外,不得未經書面許可,不得複製部分內容。所提供的內容僅供參考。