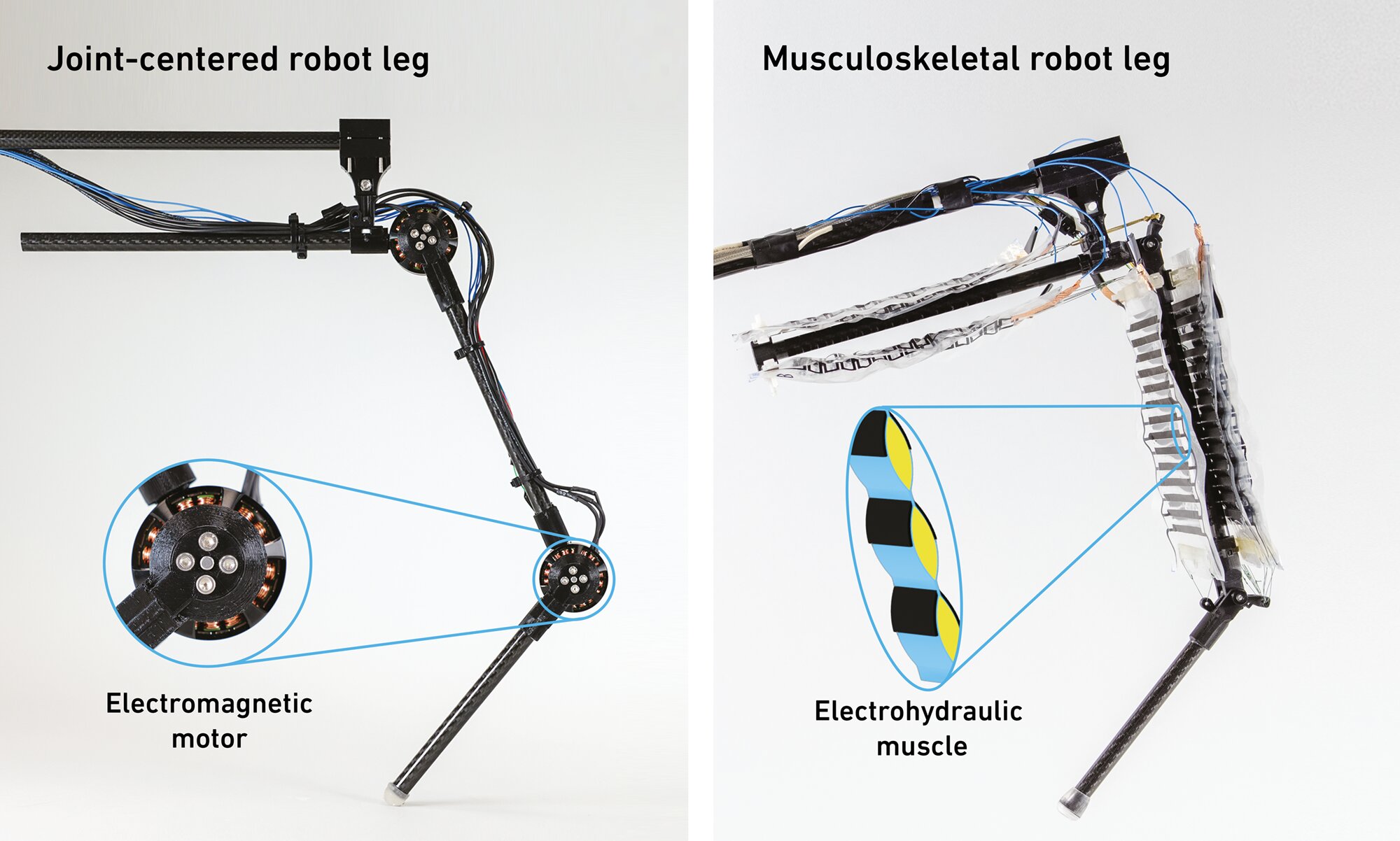
, for their musculoskeletal system the researchers use electrohydraulic actuators – i.e. artificial muscles (right). Credit: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS")
발명가와 연구자들은 거의 70년 동안 로봇을 개발해 왔습니다.지금까지 그들이 만든 모든 기계는 공장용이건 다른 곳이건 간에 한 가지 공통점이 있었습니다. 이 기계는 이미 200년 된 기술인 모터로 구동된다는 것입니다.걷는 로봇조차도 인간이나 동물처럼 근육이 아닌 모터로 구동되는 팔과 다리를 갖추고 있습니다.이는 부분적으로 생물체의 이동성과 적응성이 부족한 이유를 암시합니다.
근육으로 구동되는 새로운 로봇 다리는 기존 다리보다 에너지 효율적일 뿐만 아니라 복잡한 센서 없이도 높은 점프와 빠른 움직임을 수행하고 장애물을 감지하고 반응할 수 있습니다.새로운 다리는 CLS로 알려진 Max Planck ETH 학습 시스템 센터라는 연구 파트너십을 통해 ETH Zurich와 Max Planck 지능형 시스템 연구소(MPI-IS)의 연구원들이 개발했습니다.
CLS 팀은 ETH Zurich의 Robert Katzschmann과 MPI-IS의 Christoph Keplinger가 이끌었습니다.그들의 박사과정 학생인 Thomas Buchner와 Toshihiko Fukushima는 팀의 공동 첫 번째 저자입니다.출판동물에서 영감을 받은 근골격 로봇 다리에네이처커뮤니케이션즈.
풍선처럼 전기적으로 충전됨
인간과 동물의 경우와 마찬가지로 신근과 굴근은 로봇 다리가 양방향으로 움직일 수 있도록 해줍니다.연구원들이 HASEL이라고 부르는 이 전기 유압식 액추에이터는 힘줄로 뼈대에 부착됩니다.
작동기는 얼음을 만드는 데 사용되는 것과 유사한 기름으로 채워진 비닐 봉투입니다.각 백의 약 절반은 전도성 물질로 만들어진 검정색 전극으로 양면이 코팅되어 있습니다.
부흐너는 "전극에 전압을 가하면 정전기로 인해 서로 끌어당깁니다. 마찬가지로 풍선을 머리에 문지르면 동일한 정전기로 인해 머리카락이 풍선에 달라붙습니다."라고 설명합니다."
전압을 높이면 전극이 가까워지면서 봉지 안의 오일이 한쪽으로 밀려 가방 전체가 짧아진다.
골격에 부착된 이러한 작동기 쌍은 살아있는 생물체에서와 동일한 쌍을 이루는 근육 움직임을 가져옵니다.한 근육이 짧아지면 다른 근육은 늘어납니다.연구원들은 어떤 액추에이터가 수축하고 확장되는지 제어하기 위해 고전압 증폭기와 통신하는 컴퓨터 코드를 사용했습니다.

전기 모터보다 효율적
연구원들은 로봇 다리의 에너지 효율성을 전기 모터로 구동되는 기존 로봇 다리의 에너지 효율성과 비교했습니다.무엇보다도 그들은 얼마나 많은 에너지가 불필요하게 열로 변환되는지 분석했습니다.
"에적외선 이미지예를 들어, 구부러진 자세를 유지해야 하는 경우 전동식 다리가 훨씬 더 많은 에너지를 소비한다는 것을 쉽게 알 수 있습니다."라고 Buchner는 말합니다.
이와 대조적으로 전기 유압식 다리의 온도는 동일하게 유지됩니다.인공근육은 정전기를 일으키기 때문이다.
Buchner는 "풍선과 머리카락의 예와 같으며 머리카락이 꽤 오랫동안 풍선에 달라붙어 있습니다."라고 덧붙입니다.
"일반적으로 전기 모터 구동 로봇에는 열 관리가 필요합니다. 이를 위해서는 열을 공기로 확산시키기 위해 추가 방열판이나 팬이 필요합니다. 우리 시스템에는 그런 것이 필요하지 않습니다."라고 Fukushima는 말합니다.
고르지 않은 지형에서 민첩한 움직임
로봇 다리의 점프 능력은 폭발적으로 자신의 체중을 들어 올리는 능력에 기초합니다.연구원들은 또한 로봇 다리가 높은 수준의 적응성을 가지고 있으며 이는 소프트 로봇 공학에 특히 중요하다는 것을 보여주었습니다.근골격계는 충분한 탄력성을 가지고 있어야만 해당 지형에 유연하게 적응할 수 있습니다.
"생물의 경우에도 다르지 않습니다. 예를 들어 무릎을 구부릴 수 없으면 고르지 않은 표면을 걷는 것이 훨씬 더 어려워집니다."라고 Katzschmann은 말합니다."포장도로에서 도로로 한 발짝 내려간다고 생각해 보세요."
. Over time, energy is lost in the form of heat. In contrast, the artificial muscles (right), which work on the principle of electrostatics and are efficient, remain cold, because no current flows through them under a constant load. Credit: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS")
로봇 다리의 각도를 지속적으로 나타내기 위해 센서가 필요한 전기 모터와 달리 인공 근육은 환경과의 상호 작용을 통해 적절한 위치에 적응합니다.이는 두 개의 입력 신호에 의해서만 구동됩니다. 하나는 관절을 구부리고 다른 하나는 확장합니다.
후쿠시마는 "지형에 적응하는 것이 핵심이다. 사람이 공중으로 뛰어올라 착지할 때 무릎을 90도 각도로 구부려야 할지, 70도 각도로 구부려야 할지 미리 고민할 필요가 없다"고 설명했다.."로봇 다리의 근골격계에도 동일한 원리가 적용됩니다.착지 시 다리 관절은 표면이 단단한지 부드러운지 여부에 따라 적절한 각도로 적응적으로 움직입니다.
새로운 기술은 새로운 가능성을 열어줍니다
전기유압식 액츄에이터 연구 분야는 아직 초기 단계로, 등장한 지 6년 정도 밖에 되지 않았습니다.
"로봇 공학 분야는 고급 제어 및 기계 학습을 통해 급속한 발전을 이루고 있습니다. 반면 로봇 하드웨어의 발전은 훨씬 덜했습니다. 이는 마찬가지로 중요합니다. 이 간행물은 다음과 같은 기술을 도입함으로써 파괴적 혁신이 얼마나 큰 잠재력을 발휘할 수 있는지를 강력하게 상기시켜 줍니다.인공 근육 사용과 같은 새로운 하드웨어 개념입니다."라고 Keplinger는 말합니다.
Katzschmann은 전기 유압식 액추에이터가 건설 현장의 중장비에 사용될 가능성은 없지만 표준 전기 모터에 비해 특별한 이점을 제공한다고 덧붙였습니다.이는 특히 그립하는 물체가 공, 계란, 토마토인지 여부에 따라 움직임을 고도로 맞춤화해야 하는 그리퍼와 같은 응용 분야에서 분명하게 드러납니다.
Katzschmann은 한 가지 의구심을 갖고 있습니다. "걷는 로봇과 비교하면 다음과 같습니다.전기 모터, 우리 시스템은 여전히 제한적입니다.다리는 현재 막대에 부착되어 원을 그리며 점프하며 아직 자유롭게 움직일 수 없습니다."
향후 연구에서는 이러한 한계를 극복하여 인공 근육을 갖춘 실제 보행 로봇을 개발할 수 있는 문을 열어야 합니다.그는 "로봇 다리를 4족 로봇이나 두 다리가 있는 인간형 로봇과 결합하면 언젠가 배터리로 구동될 때 구조 로봇으로 배치할 수 있다"고 덧붙였다.
추가 정보:민첩하고 적응력이 뛰어나면서도 에너지 효율적인 이동을 위한 전기 유압식 근골격 로봇 다리네이처커뮤니케이션즈(2024).DOI: 10.1038/s41467-024-51568-3
소환:인공 근육으로 구동되는 로봇 다리는 기존 디자인을 능가합니다(2024년 9월 9일)2024년 9월 9일에 확인함https://techxplore.com/news/2024-09-robot-leg-powered-artificial-muscles.html에서
이 문서는 저작권의 보호를 받습니다.사적인 학습이나 조사를 목적으로 하는 공정한 거래를 제외하고는 어떠한 행위도 허용되지 않습니다.서면 허가 없이 일부를 복제할 수 있습니다.콘텐츠는 정보 제공 목적으로만 제공됩니다.