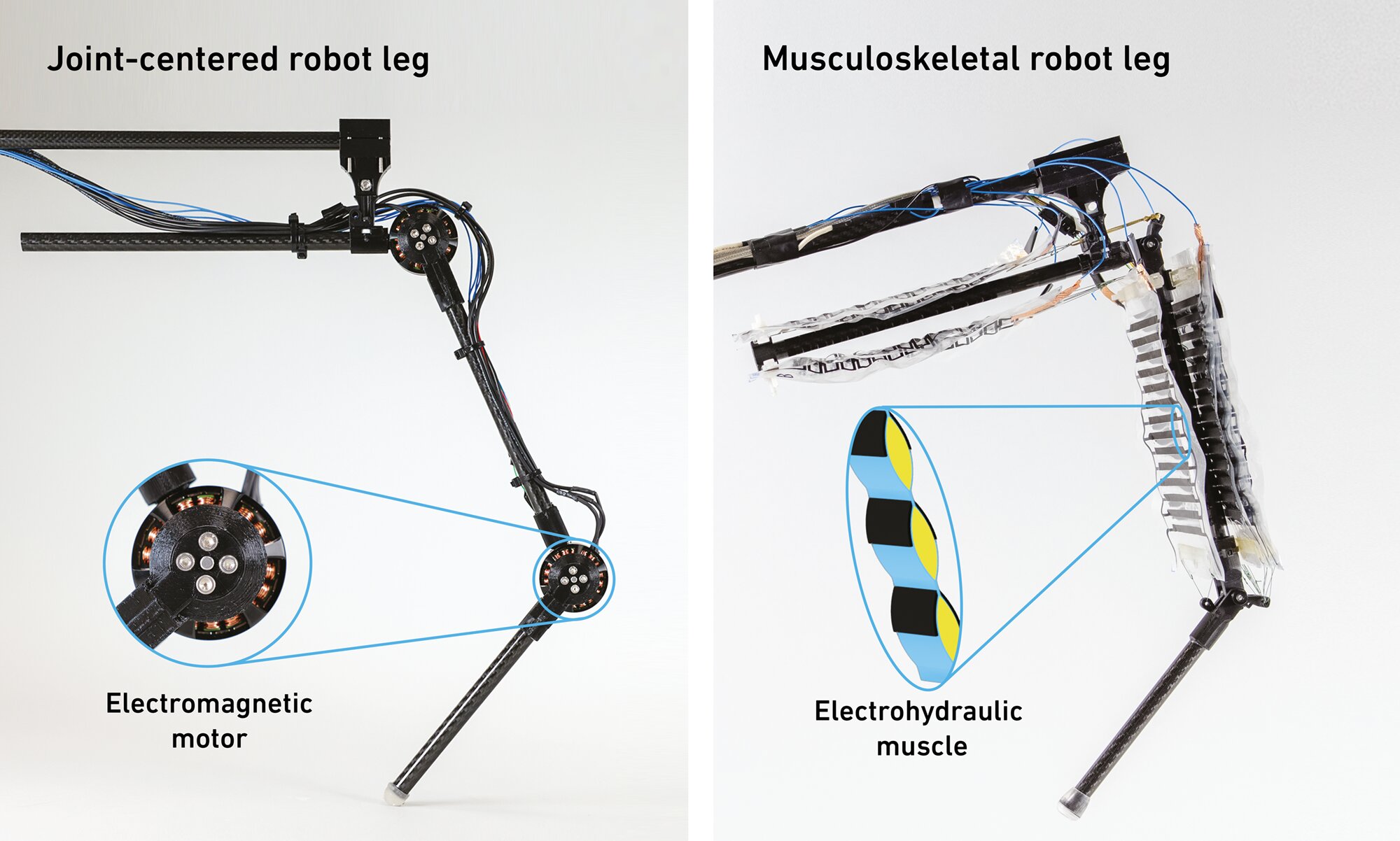
, for their musculoskeletal system the researchers use electrohydraulic actuators – i.e. artificial muscles (right). Credit: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS")
发明家和研究人员开发机器人已有近 70 年的历史。迄今为止,他们制造的所有机器——无论是为工厂还是其他地方——都有一个共同点:它们都由电机提供动力,而这项技术已有 200 年的历史。即使是行走机器人,其手臂和腿也由电机驱动,而不是像人类和动物那样由肌肉驱动。这在一定程度上说明了为什么它们缺乏生物的移动性和适应性。
一种新型的肌肉驱动机械腿不仅比传统机械腿更节能,还可以进行跳高和快速运动,以及检测障碍物并做出反应——所有这些都不需要复杂的传感器。这条新腿是由苏黎世联邦理工学院和马克斯·普朗克智能系统研究所 (MPI-IS) 的研究人员在马克斯·普朗克 ETH 学习系统中心 (CLS) 的研究合作伙伴关系下开发的。
CLS 团队由苏黎世联邦理工学院的 Robert Katzschmann 和 MPI-IS 的 Christoph Keplinger 领导。他们的博士生 Thomas Buchner 和 Toshihiko Fukushima 是该团队论文的共同第一作者发布受动物启发的肌肉骨骼机器人腿自然通讯。
像气球一样带电
与人类和动物一样,伸肌和屈肌确保机器人腿可以双向移动。这些电动液压执行器被研究人员称为 HASEL,通过肌腱连接到骨骼上。
执行器是充满油的塑料袋,类似于用于制作冰块的塑料袋。每个袋子的大约一半的两侧都涂有由导电材料制成的黑色电极。
布赫纳解释说:“一旦我们向电极施加电压,它们就会因静电而相互吸引。同样,当我用气球摩擦头部时,由于同样的静电,我的头发会粘在气球上。”
随着电压的增加,电极会靠得更近,并将袋子中的油推到一侧,从而使袋子整体变短。
连接到骨骼上的成对执行器会产生与生物体相同的成对肌肉运动。当一块肌肉缩短时,另一块肌肉就会延长。研究人员使用与高压放大器通信的计算机代码来控制哪些执行器收缩和伸展。

比电动机更高效
研究人员将他们的机械腿的能源效率与由电动机驱动的传统机械腿的能源效率进行了比较。除此之外,他们还分析了有多少能量被不必要地转化为热量。
“关于红外图像,很容易看出,如果机动腿必须保持弯曲位置,它会消耗更多的能量,”布赫纳说。
相比之下,电动液压支腿的温度保持不变。这是因为人造肌肉是静电的。
“这就像气球和头发的例子,头发在气球上停留了很长一段时间,”布赫纳补充道。
“通常,电动机驱动的机器人需要热管理,这需要额外的散热器或风扇将热量扩散到空气中。我们的系统不需要它们,”福岛说。
在不平坦的地形上灵活移动
机器腿的跳跃能力是基于其爆发性提升自身重量的能力。研究人员还表明,机械腿具有高度的适应性,这对于软体机器人尤为重要。只有肌肉骨骼系统具有足够的弹性,才能灵活地适应地形。
“这对于生物来说没有什么不同。例如,如果我们不能弯曲膝盖,在不平坦的表面上行走就会变得更加困难,”卡茨施曼说。“想象一下从人行道上走下来,走上马路。”
. Over time, energy is lost in the form of heat. In contrast, the artificial muscles (right), which work on the principle of electrostatics and are efficient, remain cold, because no current flows through them under a constant load. Credit: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS")
与需要传感器不断指示机械腿角度的电动机相比,人造肌肉通过与环境的相互作用来适应合适的位置。这仅由两个输入信号驱动:一个用于弯曲关节,另一个用于伸展关节。
福岛解释说:“适应地形是一个关键方面。当一个人跳到空中落地时,他们不必提前考虑膝盖应该弯曲90度还是70度”。同样的原理也适用于机器人腿的肌肉骨骼系统。着陆时,腿部关节会根据表面是硬还是软自适应地移动到合适的角度。
新兴技术开辟了新的可能性
电液执行器的研究领域还很年轻,大约在六年前才出现。
“机器人领域在先进控制和机器学习方面正在取得快速进展;相比之下,同样重要的机器人硬件方面的进展则要少得多。这份出版物有力地提醒我们,引入颠覆性创新的潜力有多大。新的硬件概念,例如人造肌肉的使用,”凯普林格说。
Katzschmann 补充说,电动液压执行器不太可能用于建筑工地的重型机械,但它们确实比标准电动机具有特定的优势。这在夹具等应用中尤其明显,其中的运动必须根据被抓取的物体是球、鸡蛋还是西红柿进行高度定制。
卡茨施曼确实有一个保留:“与具有电动机,我们的系统仍然有限。这条腿目前连接在一根杆上,会不停地跳来跳去,还不能自由移动。”
未来的工作应该克服这些限制,为开发具有人造肌肉的真正步行机器人打开大门。他进一步阐述道:“如果我们将机械腿与四足机器人或两条腿的人形机器人结合起来,也许有一天,当它由电池供电时,我们可以将其部署为救援机器人。”
更多信息:电动液压肌肉骨骼机器人腿可实现敏捷、自适应且节能的运动,自然通讯(2024)。DOI:10.1038/s41467-024-51568-3
引文:由人造肌肉驱动的机器人腿优于传统设计(2024 年 9 月 9 日)检索日期:2024 年 9 月 9 日来自 https://techxplore.com/news/2024-09-robot-leg-powered-artificial-muscles.html
本文档受版权保护。除了出于私人学习或研究目的的任何公平交易外,不得未经书面许可,不得复制部分内容。所提供的内容仅供参考。