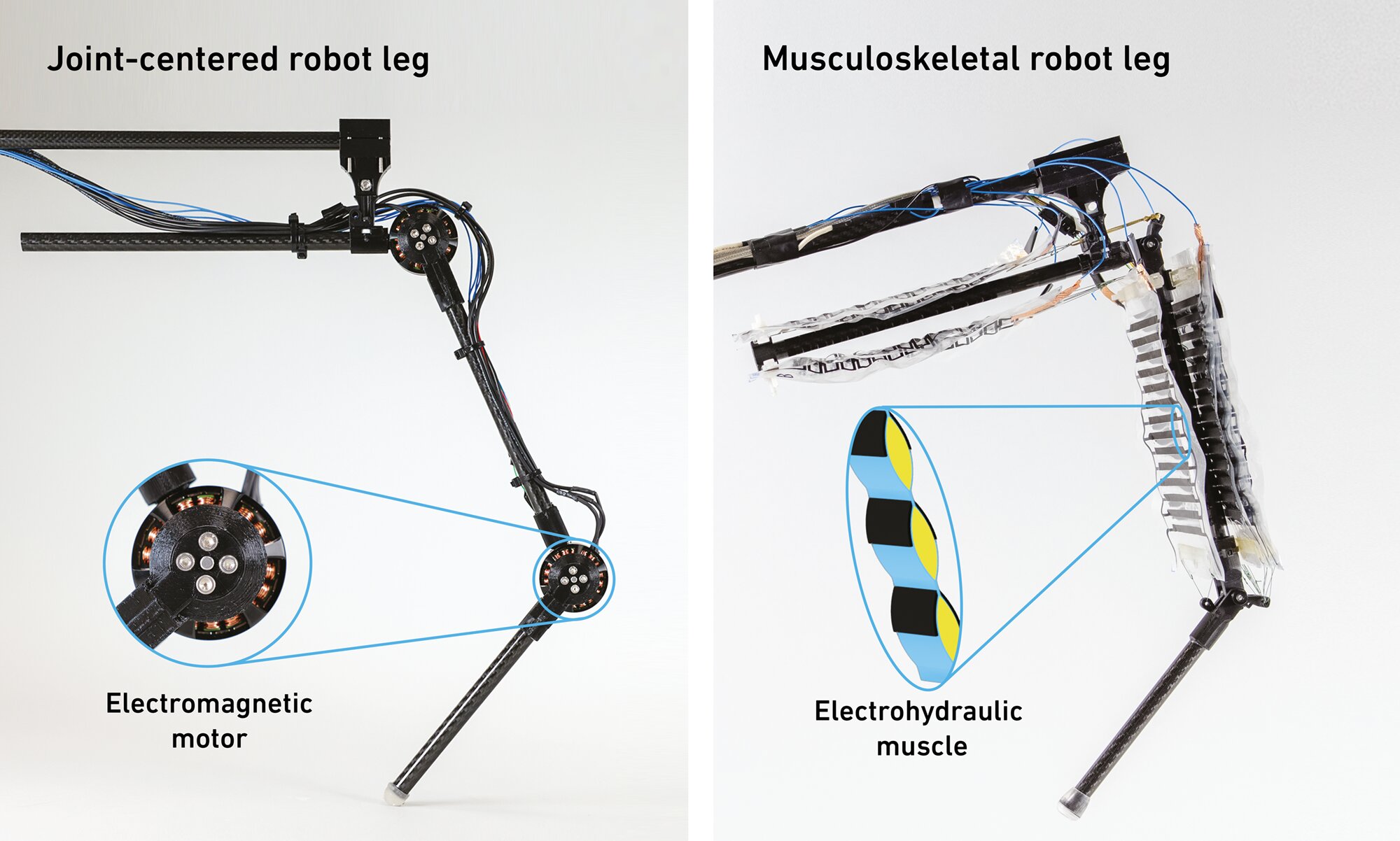
, for their musculoskeletal system the researchers use electrohydraulic actuators – i.e. artificial muscles (right). Credit: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS")
Inventores e investigadores llevan casi 70 años desarrollando robots.Hasta la fecha, todas las máquinas que han construido, ya sea para fábricas o para otros lugares, tienen una cosa en común: funcionan con motores, una tecnología que ya tiene 200 años.Incluso los robots que caminan tienen brazos y piernas impulsados por motores, no por músculos como en los humanos y los animales.Esto sugiere en parte por qué carecen de la movilidad y adaptabilidad de los seres vivos.
Una nueva pierna robótica impulsada por músculos no sólo es más eficiente energéticamente que una convencional, sino que también puede realizar saltos altos y movimientos rápidos, así como detectar obstáculos y reaccionar ante ellos, todo sin la necesidad de sensores complejos.La nueva pierna ha sido desarrollada por investigadores de ETH Zurich y el Instituto Max Planck de Sistemas Inteligentes (MPI-IS) en una asociación de investigación llamada Centro Max Planck ETH para Sistemas de Aprendizaje, conocido como CLS.
El equipo de CLS estuvo dirigido por Robert Katzschmann de ETH Zurich y Christoph Keplinger de MPI-IS.Sus estudiantes de doctorado Thomas Buchner y Toshihiko Fukushima son los coautores del trabajo del equipo.publicaciónsobre una pierna robótica musculoesquelética inspirada en animales enComunicaciones de la naturaleza.
Cargado eléctricamente como un globo.
Al igual que en humanos y animales, un músculo extensor y un flexor garantizan que la pierna robótica pueda moverse en ambas direcciones.Estos actuadores electrohidráulicos, que los investigadores denominan HASEL, están unidos al esqueleto mediante tendones.
Los actuadores son bolsas de plástico llenas de aceite, similares a las que se utilizan para fabricar cubitos de hielo.Aproximadamente la mitad de cada bolsa está recubierta a cada lado con un electrodo negro hecho de un material conductor.
Buchner explica: "Tan pronto como aplicamos voltaje a los electrodos, estos se atraen entre sí debido a la electricidad estática. De manera similar, cuando froto un globo contra mi cabeza, mi cabello se pega al globo debido a la misma electricidad estática."
A medida que se aumenta el voltaje, los electrodos se acercan y empujan el aceite de la bolsa hacia un lado, haciendo que la bolsa sea más corta en general.
Los pares de estos actuadores unidos a un esqueleto dan como resultado los mismos movimientos musculares emparejados que en los seres vivos.A medida que un músculo se acorta, su contraparte se alarga.Los investigadores utilizaron un código informático que se comunica con amplificadores de alto voltaje para controlar qué actuadores se contraen y cuáles se extienden.

Más eficiente que los motores eléctricos.
Los investigadores compararon la eficiencia energética de su pierna robótica con la de una pierna robótica convencional impulsada por un motor eléctrico.Entre otras cosas, analizaron cuánta energía se convierte innecesariamente en calor.
"Sobre elimagen infrarroja"Es fácil ver que la pierna motorizada consume mucha más energía si, por ejemplo, tiene que mantenerse en una posición doblada", afirma Buchner.
Por el contrario, la temperatura en el tramo electrohidráulico se mantiene constante.Esto se debe a que el músculo artificial es electrostático.
"Es como en el ejemplo del globo y el pelo, donde el pelo permanece pegado al globo durante bastante tiempo", añade Buchner.
"Normalmente, los robots impulsados por motores eléctricos necesitan gestión del calor, lo que requiere disipadores de calor o ventiladores adicionales para difundir el calor al aire. Nuestro sistema no los requiere", dice Fukushima.
Movimiento ágil sobre terreno irregular.
La capacidad de salto de la pierna robótica se basa en su capacidad para levantar su propio peso de forma explosiva.Los investigadores también demostraron que la pierna robótica tiene un alto grado de adaptabilidad, lo que es especialmente importante en el caso de la robótica blanda.Sólo si el sistema musculoesquelético tiene suficiente elasticidad podrá adaptarse con flexibilidad al terreno en cuestión.
"Con los seres vivos no ocurre lo mismo. Si, por ejemplo, no podemos doblar las rodillas, caminar sobre una superficie irregular se vuelve mucho más difícil", afirma Katzschmann."Basta pensar en dar un paso desde la acera hasta la carretera".
. Over time, energy is lost in the form of heat. In contrast, the artificial muscles (right), which work on the principle of electrostatics and are efficient, remain cold, because no current flows through them under a constant load. Credit: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS")
A diferencia de los motores eléctricos que requieren sensores que indiquen constantemente el ángulo de la pierna robótica, el músculo artificial se adapta a una posición adecuada mediante la interacción con el entorno.Esto es impulsado sólo por dos señales de entrada: una para doblar la articulación y otra para extenderla.
Fukushima explica: "La adaptación al terreno es un aspecto clave. Cuando una persona aterriza después de saltar en el aire, no tiene que pensar de antemano si debe doblar las rodillas en un ángulo de 90 grados o de 70 grados.".El mismo principio se aplica al sistema musculoesquelético de la pierna robótica;Al aterrizar, la articulación de la pierna se mueve de forma adaptativa en un ángulo adecuado dependiendo de si la superficie es dura o blanda.
La tecnología emergente abre nuevas posibilidades
El campo de investigación de los actuadores electrohidráulicos es aún joven y surgió hace sólo seis años.
"El campo de la robótica está progresando rápidamente con controles avanzados y aprendizaje automático; en cambio, ha habido mucho menos progreso con el hardware robótico, lo cual es igualmente importante. Esta publicación es un poderoso recordatorio de cuánto potencial para la innovación disruptiva surge de la introducciónnuevos conceptos de hardware, como el uso de músculos artificiales", afirma Keplinger.
Katzschmann añade que es poco probable que los actuadores electrohidráulicos se utilicen en maquinaria pesada en las obras, pero ofrecen ventajas específicas sobre los motores eléctricos estándar.Esto es particularmente evidente en aplicaciones como las pinzas, donde los movimientos deben personalizarse en gran medida dependiendo de si el objeto que se agarra es, por ejemplo, una pelota, un huevo o un tomate.
Katzschmann tiene una reserva: "En comparación con los robots andantes conmotores electricos, nuestro sistema todavía es limitado.Actualmente la pierna está sujeta a una barra, salta en círculos y aún no puede moverse libremente".
El trabajo futuro debería superar estas limitaciones, abriendo la puerta al desarrollo de robots andantes reales con músculos artificiales.Y añade: "Si combinamos la pierna robótica con un robot cuadrúpedo o un robot humanoide con dos piernas, tal vez algún día, cuando funcione con batería, podamos implementarlo como un robot de rescate".
Más información:Pierna robótica musculoesquelética electrohidráulica para una locomoción ágil, adaptable pero energéticamente eficiente.Comunicaciones de la naturaleza(2024).DOI: 10.1038/s41467-024-51568-3
Citación:Una pierna robótica impulsada por músculos artificiales supera a los diseños convencionales (9 de septiembre de 2024)recuperado el 9 de septiembre de 2024de https://techxplore.com/news/2024-09-robot-leg-powered-artificial-muscles.html
Este documento está sujeto a derechos de autor.Aparte de cualquier trato justo con fines de estudio o investigación privados, noparte puede ser reproducida sin el permiso por escrito.El contenido se proporciona únicamente con fines informativos.