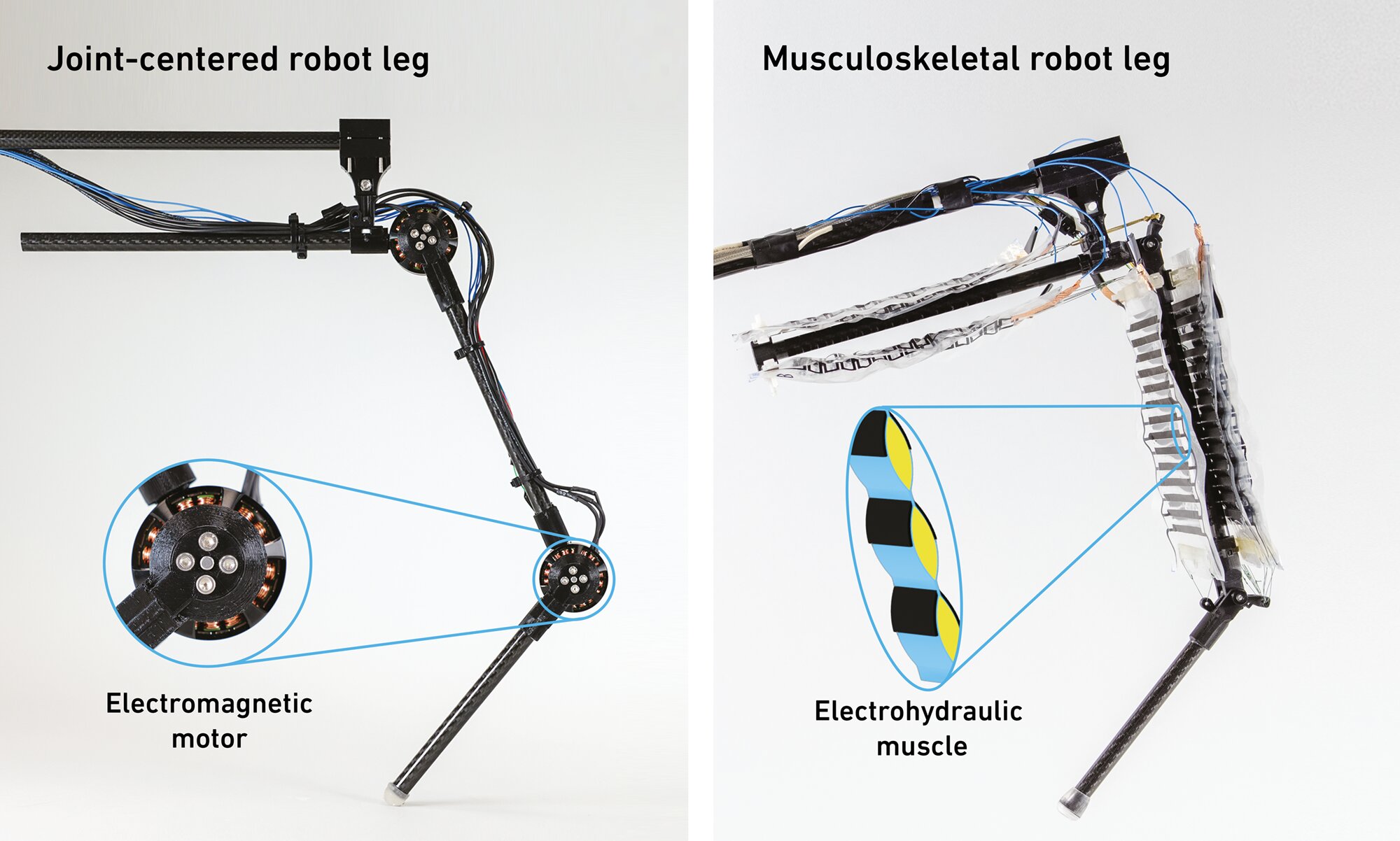
, for their musculoskeletal system the researchers use electrohydraulic actuators – i.e. artificial muscles (right). Credit: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS")
आविष्कारक और शोधकर्ता लगभग 70 वर्षों से रोबोट विकसित कर रहे हैं।आज तक, उन्होंने जितनी भी मशीनें बनाई हैं - चाहे कारखानों के लिए या कहीं और - उनमें एक बात समान है: वे मोटरों द्वारा संचालित होती हैं, एक तकनीक जो पहले से ही 200 साल पुरानी है।यहां तक कि चलने वाले रोबोट में भी हाथ और पैर मोटर से चलते हैं, इंसानों और जानवरों की तरह मांसपेशियों से नहीं।इससे कुछ हद तक पता चलता है कि उनमें जीवित प्राणियों की गतिशीलता और अनुकूलनशीलता की कमी क्यों है।
एक नया मांसपेशी-संचालित रोबोटिक पैर न केवल पारंपरिक पैर की तुलना में अधिक ऊर्जा कुशल है, बल्कि यह ऊंची छलांग और तेज गति के साथ-साथ जटिल सेंसर की आवश्यकता के बिना बाधाओं का पता लगा सकता है और उन पर प्रतिक्रिया भी कर सकता है।नया चरण ईटीएच ज्यूरिख और मैक्स प्लैंक इंस्टीट्यूट फॉर इंटेलिजेंट सिस्टम्स (एमपीआई-आईएस) के शोधकर्ताओं द्वारा मैक्स प्लैंक ईटीएच सेंटर फॉर लर्निंग सिस्टम्स नामक एक शोध साझेदारी में विकसित किया गया है, जिसे सीएलएस के नाम से जाना जाता है।
सीएलएस टीम का नेतृत्व ईटीएच ज्यूरिख में रॉबर्ट काट्ज़स्चमैन और एमपीआई-आईएस में क्रिस्टोफ़ केपलिंगर ने किया था।उनके डॉक्टरेट छात्र थॉमस बुचनर और तोशिहिको फुकुशिमा टीम के सह-प्रथम लेखक हैंप्रकाशनपशु-प्रेरित मस्कुलोस्केलेटल रोबोटिक पैर परप्रकृति संचार.
गुब्बारे की तरह विद्युत चार्ज
इंसानों और जानवरों की तरह, एक एक्सटेंसर और एक फ्लेक्सर मांसपेशी यह सुनिश्चित करती है कि रोबोटिक पैर दोनों दिशाओं में घूम सके।ये इलेक्ट्रो-हाइड्रोलिक एक्चुएटर्स, जिन्हें शोधकर्ता एचएएसईएल कहते हैं, टेंडन द्वारा कंकाल से जुड़े होते हैं।
एक्चुएटर्स तेल से भरी प्लास्टिक की थैलियाँ हैं, जो बर्फ के टुकड़े बनाने के लिए उपयोग की जाने वाली थैलियों के समान हैं।प्रत्येक बैग का लगभग आधा हिस्सा दोनों तरफ एक प्रवाहकीय सामग्री से बने काले इलेक्ट्रोड से लेपित होता है।
बुचनर बताते हैं, "जैसे ही हम इलेक्ट्रोड पर वोल्टेज लागू करते हैं, वे स्थैतिक बिजली के कारण एक-दूसरे की ओर आकर्षित होते हैं। इसी तरह, जब मैं अपने सिर पर एक गुब्बारा रगड़ता हूं, तो उसी स्थैतिक बिजली के कारण मेरे बाल गुब्बारे से चिपक जाते हैं।"
जैसे ही कोई वोल्टेज बढ़ाता है, इलेक्ट्रोड करीब आते हैं और बैग में तेल को एक तरफ धकेल देते हैं, जिससे बैग कुल मिलाकर छोटा हो जाता है।
कंकाल से जुड़े इन एक्चुएटर्स के जोड़े के परिणामस्वरूप जीवित प्राणियों की तरह ही युग्मित मांसपेशी गतिविधियां होती हैं।जैसे-जैसे एक मांसपेशी छोटी होती जाती है, उसकी समकक्ष मांसपेशी लंबी होती जाती है।शोधकर्ताओं ने एक कंप्यूटर कोड का उपयोग किया जो उच्च-वोल्टेज एम्पलीफायरों के साथ संचार करता है ताकि यह नियंत्रित किया जा सके कि कौन से एक्चुएटर सिकुड़ते हैं और कौन से विस्तारित होते हैं।

विद्युत मोटरों की तुलना में अधिक कुशल
शोधकर्ताओं ने अपने रोबोटिक पैर की ऊर्जा दक्षता की तुलना इलेक्ट्रिक मोटर द्वारा संचालित पारंपरिक रोबोटिक पैर से की।अन्य बातों के अलावा, उन्होंने विश्लेषण किया कि कितनी ऊर्जा अनावश्यक रूप से ऊष्मा में परिवर्तित हो जाती है।
"परअवरक्त छविबुचनर कहते हैं, "यह देखना आसान है कि मोटर चालित पैर बहुत अधिक ऊर्जा की खपत करता है, अगर कहें तो उसे मुड़ी हुई स्थिति में रहना पड़ता है।"
इसके विपरीत, इलेक्ट्रो-हाइड्रोलिक लेग में तापमान समान रहता है।ऐसा इसलिए है क्योंकि कृत्रिम मांसपेशी इलेक्ट्रोस्टैटिक है।
बुचनर कहते हैं, "यह गुब्बारे और बालों के उदाहरण जैसा है, जहां बाल काफी लंबे समय तक गुब्बारे से चिपके रहते हैं।"
फुकुशिमा का कहना है, "आम तौर पर, इलेक्ट्रिक मोटर चालित रोबोटों को गर्मी प्रबंधन की आवश्यकता होती है, जिसके लिए गर्मी को हवा में फैलाने के लिए अतिरिक्त हीट सिंक या पंखे की आवश्यकता होती है। हमारे सिस्टम को उनकी आवश्यकता नहीं है।"
असमान भूभाग पर चुस्त चाल
रोबोटिक पैर की कूदने की क्षमता विस्फोटक तरीके से अपना वजन उठाने की क्षमता पर आधारित होती है।शोधकर्ताओं ने यह भी दिखाया कि रोबोटिक पैर में उच्च स्तर की अनुकूलन क्षमता होती है, जो नरम रोबोटिक्स के लिए विशेष रूप से महत्वपूर्ण है।केवल अगर मस्कुलोस्केलेटल सिस्टम में पर्याप्त लोच है तो यह संबंधित इलाके में लचीले ढंग से अनुकूलित हो सकता है।
"यह जीवित प्राणियों के साथ अलग नहीं है। उदाहरण के लिए, यदि हम अपने घुटनों को मोड़ नहीं सकते हैं, तो असमान सतह पर चलना अधिक कठिन हो जाता है," काट्ज़स्चमन कहते हैं।"बस फुटपाथ से सड़क पर एक कदम नीचे उतरने के बारे में सोचें।"
. Over time, energy is lost in the form of heat. In contrast, the artificial muscles (right), which work on the principle of electrostatics and are efficient, remain cold, because no current flows through them under a constant load. Credit: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS")
रोबोटिक पैर के कोण को लगातार इंगित करने के लिए सेंसर की आवश्यकता वाले इलेक्ट्रिक मोटरों के विपरीत, कृत्रिम मांसपेशी पर्यावरण के साथ बातचीत के माध्यम से एक उपयुक्त स्थिति में ढल जाती है।यह केवल दो इनपुट संकेतों द्वारा संचालित होता है: एक जोड़ को मोड़ने के लिए और एक इसे विस्तारित करने के लिए।
फुकुशिमा बताते हैं, "इलाके के अनुकूल ढलना एक महत्वपूर्ण पहलू है। जब कोई व्यक्ति हवा में कूदने के बाद उतरता है, तो उसे पहले से यह सोचने की ज़रूरत नहीं होती है कि उसे अपने घुटनों को 90 डिग्री या 70 डिग्री के कोण पर मोड़ना चाहिए या नहीं।"।"यही सिद्धांत रोबोटिक पैर के मस्कुलोस्केलेटल सिस्टम पर भी लागू होता है;उतरने पर, पैर का जोड़ अनुकूल रूप से एक उपयुक्त कोण में चला जाता है, यह इस बात पर निर्भर करता है कि सतह कठोर है या नरम।
उभरती प्रौद्योगिकी नई संभावनाओं के द्वार खोलती है
इलेक्ट्रोहाइड्रोलिक एक्चुएटर्स का अनुसंधान क्षेत्र अभी भी युवा है, लगभग छह साल पहले ही उभरा था।
"रोबोटिक्स का क्षेत्र उन्नत नियंत्रण और मशीन लर्निंग के साथ तेजी से प्रगति कर रहा है; इसके विपरीत, रोबोटिक हार्डवेयर के साथ बहुत कम प्रगति हुई है, जो समान रूप से महत्वपूर्ण है। यह प्रकाशन एक शक्तिशाली अनुस्मारक है कि विघटनकारी नवाचार की कितनी संभावनाएं पेश करने से आती हैंनई हार्डवेयर अवधारणाएँ, जैसे कृत्रिम मांसपेशियों का उपयोग,'' केप्लिंगर कहते हैं।
काट्ज़स्चमैन कहते हैं कि निर्माण स्थलों पर भारी मशीनरी में इलेक्ट्रो-हाइड्रोलिक एक्चुएटर्स का उपयोग किए जाने की संभावना नहीं है, लेकिन वे मानक इलेक्ट्रिक मोटरों की तुलना में विशिष्ट लाभ प्रदान करते हैं।यह ग्रिपर्स जैसे अनुप्रयोगों में विशेष रूप से स्पष्ट है, जहां गतिविधियों को इस आधार पर अत्यधिक अनुकूलित करना पड़ता है कि पकड़ी जाने वाली वस्तु है - उदाहरण के लिए - एक गेंद, एक अंडा या एक टमाटर।
काट्ज़स्चमन के पास एक आरक्षण है: "चलने वाले रोबोट की तुलना मेंबिजली की मोटरें, हमारा सिस्टम अभी भी सीमित है।पैर फिलहाल एक रॉड से जुड़ा हुआ है, गोल-गोल घूम रहा है और अभी भी स्वतंत्र रूप से नहीं चल सकता है।"
भविष्य के काम को इन सीमाओं को पार करना चाहिए, जिससे कृत्रिम मांसपेशियों के साथ वास्तविक चलने वाले रोबोट विकसित करने का द्वार खुल जाएगा।वह आगे बताते हैं, "अगर हम रोबोटिक पैर को चार पैरों वाले रोबोट या दो पैरों वाले ह्यूमनॉइड रोबोट के साथ जोड़ दें, तो शायद एक दिन, जब यह बैटरी से संचालित होगा, हम इसे एक बचाव रोबोट के रूप में तैनात कर सकते हैं।"
अधिक जानकारी:चुस्त, अनुकूली, फिर भी ऊर्जा-कुशल हरकत के लिए इलेक्ट्रोहाइड्रोलिक मस्कुलोस्केलेटल रोबोटिक पैर,प्रकृति संचार(2024)।डीओआई: 10.1038/एस41467-024-51568-3
उद्धरण:कृत्रिम मांसपेशियों द्वारा संचालित रोबोट पैर पारंपरिक डिजाइनों से बेहतर प्रदर्शन करता है (2024, 9 सितंबर)9 सितंबर 2024 को पुनः प्राप्तhttps://techxplore.com/news/2024-09-robot-leg-powered-artificial-muscles.html से
यह दस्तावेज कॉपीराइट के अधीन है।निजी अध्ययन या अनुसंधान के उद्देश्य से किसी भी निष्पक्ष व्यवहार के अलावा, नहींलिखित अनुमति के बिना भाग को पुन: प्रस्तुत किया जा सकता है।सामग्री केवल सूचना के प्रयोजनों के लिए प्रदान की गई है।