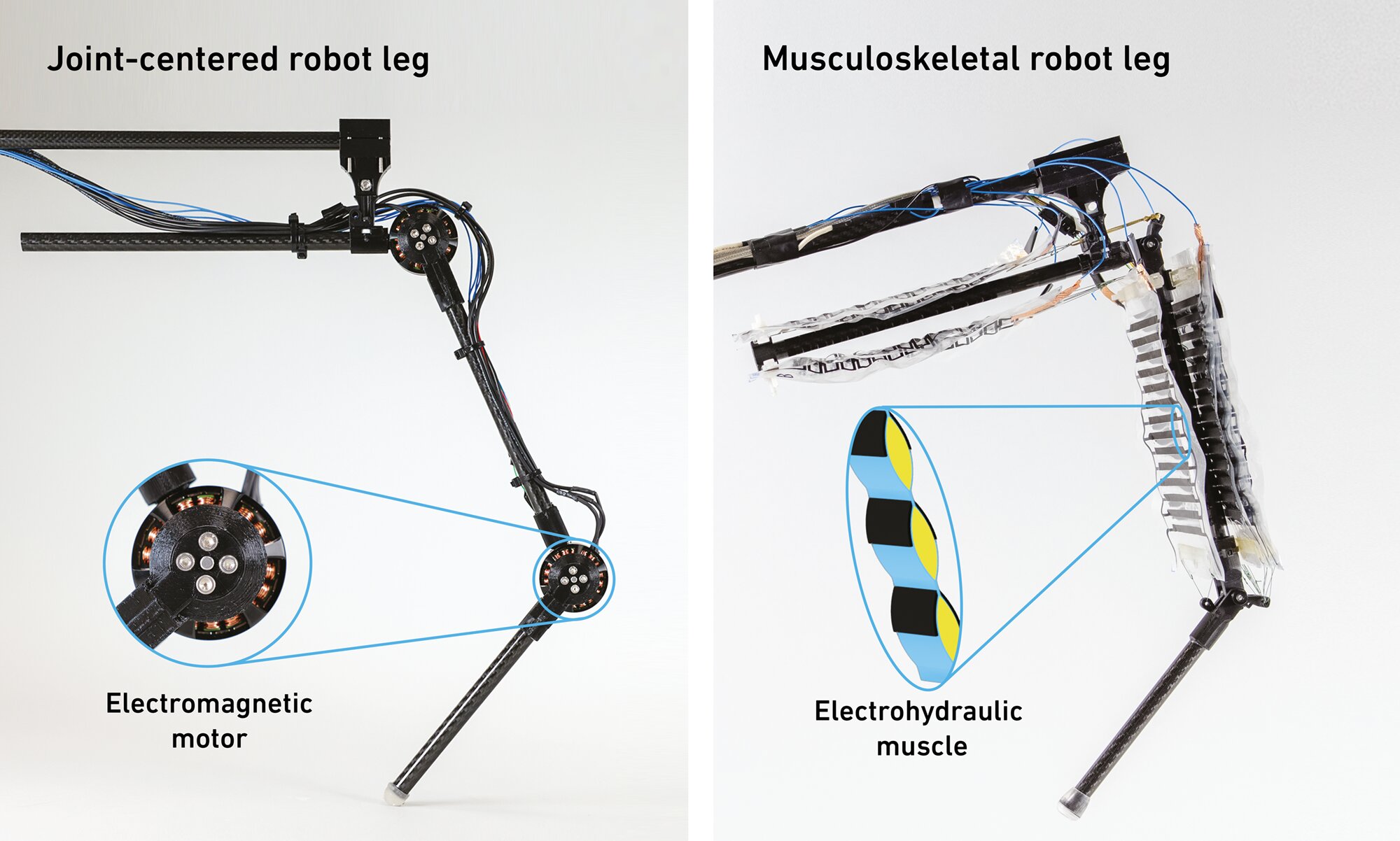
, for their musculoskeletal system the researchers use electrohydraulic actuators – i.e. artificial muscles (right). Credit: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS")
発明家や研究者は、70 年近くにわたってロボットを開発してきました。現在までに、工場であろうと他の場所であろうと、彼らが作ったすべての機械には共通点があります。それは、すでに 200 年前の技術であるモーターを動力源としているということです。歩行ロボットでさえ、人間や動物のように筋肉ではなく、モーターによって動かされる腕と脚を備えています。このことは、彼らが生物のような機動力や適応力に欠けている理由の一部を示唆しています。
新しい筋力ロボット脚は、従来のロボット脚よりもエネルギー効率が高いだけでなく、複雑なセンサーを必要とせずに、高いジャンプや素早い動きを実行できるだけでなく、障害物を検出して反応することもできます。この新しい脚部は、チューリッヒ工科大学とマックス プランク インテリジェント システム研究所 (MPI-IS) の研究者によって、CLS として知られるマックス プランク ETH 学習システム センターと呼ばれる研究パートナーシップで開発されました。
CLS チームはチューリッヒ工科大学の Robert Katzschmann 氏と MPI-IS の Christoph Keplinger 氏が率いました。彼らの博士課程の学生であるトーマス・ブフナー氏と福島俊彦氏は、チームの共同論文の共同執筆者です。出版物動物からインスピレーションを得た筋骨格ロボットの脚でネイチャーコミュニケーションズ。
風船のように帯電する
人間や動物と同様に、ロボットの脚は伸筋と屈筋によって確実に両方向に動くことができます。研究者らがHASELと呼ぶこれらの電気油圧アクチュエータは、腱によって骨格に取り付けられている。
アクチュエーターは、角氷を作るために使用されるものと同様の、油が入ったビニール袋です。各バッグの約半分の両面が、導電性材料で作られた黒色の電極でコーティングされています。
ブフナー氏は、「電極に電圧を加えるとすぐに、静電気によって電極が互いに引き寄せられます。同様に、風船を頭にこすりつけると、同じ静電気によって髪が風船にくっつきます。」
電圧を上げると、電極が近づき、バッグ内のオイルが片側に押し出され、バッグ全体が短くなります。
これらのアクチュエーターのペアを骨格に取り付けると、生き物と同じペアの筋肉の動きが生じます。1 つの筋肉が短縮すると、対応する筋肉が長くなります。研究者らは、高電圧アンプと通信するコンピューターコードを使用して、どのアクチュエーターが収縮し、どのアクチュエーターが伸びるかを制御しました。

電気モーターよりも効率が高い
研究者らは、ロボット脚のエネルギー効率を、電気モーターで駆動される従来のロボット脚のエネルギー効率と比較しました。とりわけ、どれだけのエネルギーが不必要に熱に変換されるかを分析しました。
「上で赤外線画像たとえば、脚が曲がった状態を維持する必要がある場合、電動脚がより多くのエネルギーを消費することは簡単にわかります」とブフナー氏は言います。
対照的に、電気油圧脚の温度は同じままです。これは人工筋肉が静電気を帯びているためです。
「これは風船と髪の毛の例に似ています。髪の毛がかなり長い間風船にくっついたままになります」とブフナー氏は付け加えた。
「通常、電気モーター駆動のロボットには熱管理が必要です。そのためには、熱を空気に拡散するための追加のヒートシンクやファンが必要です。私たちのシステムにはそれらは必要ありません」と福島氏は言う。
不整地でも機敏に移動
ロボットの脚のジャンプ能力は、自重を爆発的に持ち上げる能力に基づいています。研究者らはまた、ロボットの脚には高度な適応性があり、これはソフトロボット工学にとって特に重要であることも示した。筋骨格系に十分な弾力性がある場合にのみ、問題の地形に柔軟に適応できます。
「これは生き物でも同じです。たとえば、膝を曲げることができない場合、平らでない地面を歩くことははるかに困難になります」とカッツシュマン氏は言います。「歩道から車道に一歩降りてみることを考えてみてください。」
. Over time, energy is lost in the form of heat. In contrast, the artificial muscles (right), which work on the principle of electrostatics and are efficient, remain cold, because no current flows through them under a constant load. Credit: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS")
電気モーターがロボットの脚の角度を常に示すためにセンサーを必要とするのとは対照的に、人工筋肉は環境との相互作用を通じて適切な位置に適応します。これは 2 つの入力信号によってのみ駆動されます。1 つは関節を曲げる信号、もう 1 つは関節を伸ばす信号です。
福島教授は、「地形への適応が重要です。空中にジャンプして着地するとき、膝を90度に曲げるべきか、70度に曲げるべきかを事前に考える必要はありません」と説明します。。」同じ原理がロボットの脚の筋骨格系にも当てはまります。着地すると、地面が硬いか柔らかいかに応じて、脚の関節が適切な角度に適応的に動きます。
新たなテクノロジーが新たな可能性を切り開く
電気油圧アクチュエータの研究分野はまだ新しく、わずか 6 年ほど前に登場したばかりです。
「ロボット工学の分野は、高度な制御と機械学習によって急速に進歩していますが、対照的に、同様に重要なロボットハードウェアの進歩ははるかに遅れています。この出版物は、ロボットの導入によって破壊的イノベーションの可能性がいかに大きいかを思い出させてくれます。」人工筋肉の使用など、新しいハードウェアのコンセプトです」とケプリンガー氏は言う。
Katzschmann 氏は、電気油圧アクチュエータが建設現場の重機に使用される可能性は低いが、標準的な電気モータに比べて特別な利点があると付け加えています。これは、グリッパーなどのアプリケーションで特に顕著であり、グリップされるオブジェクトがボール、卵、トマトかどうかに応じて動作を高度にカスタマイズする必要があります。
カッツシュマン氏には一つの留保がある。「歩行ロボットと比較すると、電気モーター、私たちのシステムはまだ制限されています。現在、脚は棒に取り付けられており、円を描くように飛び跳ねており、まだ自由に動くことはできません。」
将来の研究ではこれらの限界を克服し、人工筋肉を備えた本物の歩行ロボットの開発への扉が開かれるはずです。同氏はさらに、「ロボットの脚を四足歩行のロボットや二足の人型ロボットと組み合わせれば、いつかバッテリー駆動になり、救助ロボットとして配備できるようになるかもしれない」と詳しく述べた。
詳細情報:電気油圧式筋骨格ロボット脚により、機敏で適応力がありながらエネルギー効率の高い移動を実現します。ネイチャーコミュニケーションズ(2024年)。DOI: 10.1038/s41467-024-51568-3
引用:人工筋肉を搭載したロボットの脚は従来の設計を上回る性能を実現 (2024年9月9日)2024 年 9 月 9 日に取得https://techxplore.com/news/2024-09-robot-leg-powered-artificial-muscles.html より
この文書は著作権の対象です。個人的な研究や研究を目的とした公正な取引を除き、書面による許可なく一部を複製することができます。コンテンツは情報提供のみを目的として提供されています。