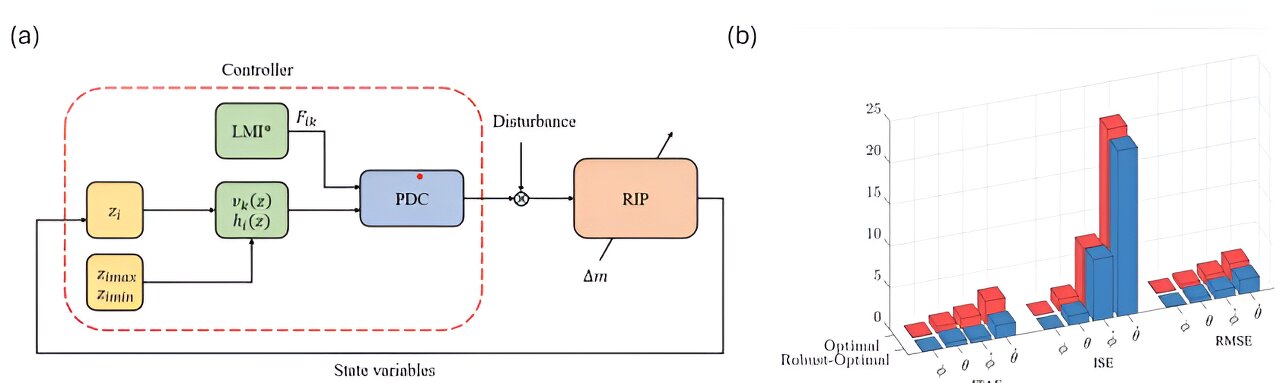
 The controller uses Parallel Distributed Compensator (PDC) as the control stratergy and Linear Matrix Inequality (LMI)-based stability conditions to achieve robust-optimal control. (b) The robust-optimal controller demonstrates lower error values in controlling the rotary inverted pendulum. Credit: Ngoc-Tam Bui, Shibaura Institute of Technology")
非線性系統在從機器人到經濟學的許多不同領域都有應用。與線性系統不同,此類系統的輸出與輸入不成比例。一個典型的例子是鐘擺的運動。由於非線性系統的固有性質,其數學建模和控制都很困難。
在這種背景下,Takagi–Sugeno (T–S) 模糊系統作為一種高效的工具應運而生。該系統利用模糊邏輯映射輸入和輸出值,將非線性系統近似為更容易建模的多個線性系統。
模糊邏輯是數理邏輯的一種形式,其中真值可以是 0 到 1 之間的任何值,而不是要求所有陳述都為真 (1) 或假 (0)。控制方法的基礎,其中平行分散式補償器(PDC) 方法最為突出。
此外,科學家還開發了該系統的增強版本,稱為模糊描述符系統(FDS)。它將 T–S 模糊系統與強大的空間狀態表示相結合,空間狀態表示以狀態變數、輸入變數和輸出變數來描述物理系統。
儘管進行了廣泛的研究,但 T–S FDS 背景下的最優控制策略仍然很大程度上未被探索。此外,雖然已經使用線性矩陣不等式 (LMI) 等方法為 T–S FDS 探索了防止幹擾的穩健控制方法,但這些方法帶來了額外的複雜性和最佳化挑戰。
為了克服這些限制,由日本芝浦理工學院工程學院創新全球計畫副教授 Ngoc-Tam Bui 領導的一組研究人員,包括 Thi-Van-Anh Nguyen、Quy-Thinh Dao 和來自河內科技大學的Duc-Binh Pham 基於T–S 模糊描述子模型開發了新型最優控制器和穩健最優控制器。他們的研究發表在雜誌上科學報告。
為了開發控制器,團隊首先利用強大的李亞普諾夫穩定性理論來建立 FDS 數學模型的穩定性條件。然而,這些穩定性條件不能直接使用。正如 Bui 博士所解釋的那樣,“FDS 模型的穩定性條件使得使用現有的數學工具很難求解。為了使它們更易於使用,我們系統地將它們轉換為 LMI。”
這些修改的條件構成了開發三種控制器的基礎:使用PDC 來管理偏差的穩定性控制器、最小化成本函數以獲得最優控制的最優控制器以及結合了兩者優點的魯棒最優控制器。
研究人員展示了這些控制器在控制旋轉倒立擺方面的有效性,這是一個具有挑戰性的系統,由位於旋轉底座上的倒立擺組成。問題是透過控制底座的旋轉來保持鐘擺直立。
研究人員使用不同的模擬場景測試了控制器的性能。模擬結果表明,當初始位移角較小時,穩定性控制器能有效穩定係統,而初始角較大時,系統振盪較多,穩定時間較長。
最佳控制器有效解決了穩定時間較長的問題,將其從 13 秒減少到 2 秒,減少了六倍。此外,它還降低了振盪期間的最大振幅。
使用兩種不同的場景對魯棒最優控制器進行了測試。在第一種情況下,擺桿的質量發生了變化,而在第二種情況下,控制輸入中引入了白噪聲。與最優控制器相比,它在第一個場景中的表現相同。然而,控制器在第二種情況下要好得多,沒有顯示出振盪,而最佳控制器顯示出明顯的振盪。值得注意的是,穩健最優控制器顯示出最低的誤差值。這些結果凸顯了這些控制器在實際場景中的適應性和潛力。
「研究結果對各種現實生活應用具有良好的影響,在這些應用中,動態和不確定環境中的穩定控制至關重要。具體來說,自動駕駛汽車使用所提出的控制器,工業機器人可以實現增強的性能和適應性,」Bui 博士評論道。
“總的來說,我們的研究為推進各個領域的控制策略開闢了道路,最終有助於打造更強大的自主系統,使交通更安全,醫療保健更有效,製造更有效率。”
更多資訊:Duc-Binh Pham 等人,透過基於模糊描述符的技術實現旋轉倒立擺控制的穩健最佳化控制,科學報告(2024)。DOI:10.1038/s41598-024-56202-2
引文:基於模糊描述符系統的新型魯棒最優控制器(2024年4月8日)檢索日期:2024 年 4 月 8 日取自 https://techxplore.com/news/2024-04-robust-optimal-based-fuzzy-descriptor.html
本文檔受版權保護。除了出於私人學習或研究目的的任何公平交易外,不得未經書面許可,不得複製部分內容。所提供的內容僅供參考。