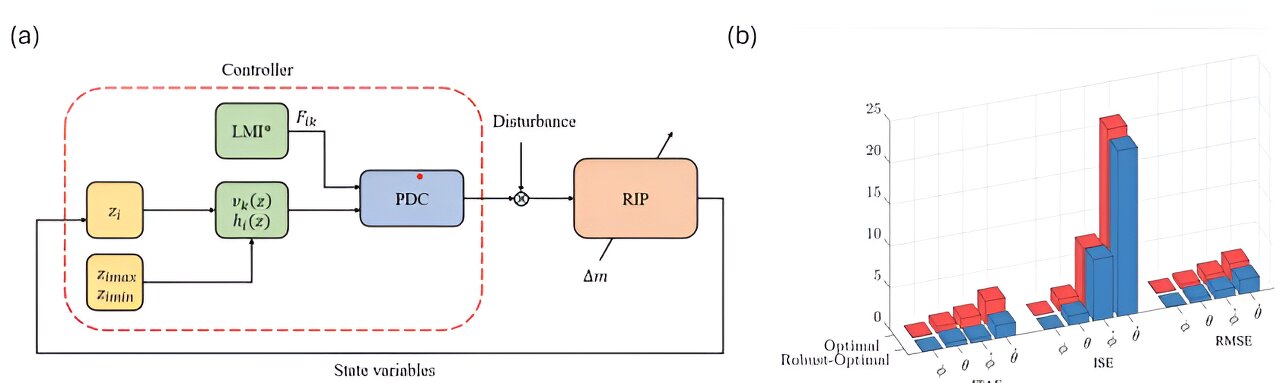
 The controller uses Parallel Distributed Compensator (PDC) as the control stratergy and Linear Matrix Inequality (LMI)-based stability conditions to achieve robust-optimal control. (b) The robust-optimal controller demonstrates lower error values in controlling the rotary inverted pendulum. Credit: Ngoc-Tam Bui, Shibaura Institute of Technology")
Los sistemas no lineales tienen aplicaciones en muchos campos diversos, desde la robótica hasta la economía.A diferencia de los sistemas lineales, la salida no es proporcional a la entrada en dichos sistemas.Un ejemplo clásico es el movimiento de un péndulo.Debido a la naturaleza inherente de los sistemas no lineales, su modelado matemático y, en consecuencia, su control es difícil.
En este contexto, el sistema difuso TakagiâSugeno (TâS) emerge como una herramienta muy eficaz.Este sistema aprovechalógica difusamapear valores de entrada y salida para aproximar un sistema no lineal como sistemas lineales múltiples que son más fáciles de modelar.
La lógica difusa es una forma de lógica matemática en la que, en lugar de exigir que todas las afirmaciones sean verdaderas (1) o falsas (0), los valores de verdad pueden ser cualquier valor entre 0 y 1. El sistema difuso ha servido así comola base para varios métodos de control no lineal, siendo el método del Compensador Distribuido Paralelo (PDC) el más destacado.
Además, los científicos han desarrollado una versión mejorada de este sistema, conocida como sistema de descriptores difusos (FDS).Combina el sistema difuso TâS con la poderosa representación espacial-estado, que describe un sistema físico en términos de variables de estado, variables de entrada y variables de salida.
A pesar de una extensa investigación, las estrategias de control óptimas en el contexto de las FDS TâS aún están en gran medida inexploradas.Además, si bien se han explorado métodos de control robustos, que protegen contra perturbaciones, para TâS FDS utilizando métodos como las desigualdades de matriz lineal (LMI), estos métodos introducen complejidad adicional y desafíos de optimización.
Para superar estas limitaciones, un grupo de investigadores, dirigido por el profesor asociado Ngoc-Tam Bui del Programa Global Innovador de la Facultad de Ingeniería del Instituto de Tecnología Shibaura en Japón y que incluye a Thi-Van-Anh Nguyen, Quy-Thinh Dao yDuc-Binh Pham, todos de la Universidad de Ciencia y Tecnología de Hanoi, desarrollaron novedosos controladores óptimos y robustos óptimos basados en el modelo de descriptor difuso TâS.Su estudiofue publicado en la revistaInformes Científicos.
Para desarrollar los controladores, el equipo utilizó primero la poderosa teoría de estabilidad de Lyapunov para establecer las condiciones de estabilidad para el modelo matemático del FDS.Sin embargo, estas condiciones de estabilidad no se pueden utilizar directamente.Como explica el Dr. Bui, "Las condiciones de estabilidad del modelo FDS hacen que sea difícil resolverlo utilizando herramientas matemáticas establecidas. Para hacerlos más adaptables, los transformamos sistemáticamente en LMI".
Estas condiciones modificadas formaron la base para desarrollar tres controladores: el controlador de estabilidad que utiliza PDC para gestionar las desviaciones, el controlador óptimo que minimiza una función de costo para obtener un control óptimo y el controlador óptimo robusto que combina los beneficios de ambos.
Los investigadores demostraron la eficacia de estos controladores para controlar un péndulo invertido giratorio, un sistema desafiante que comprende un péndulo invertido apoyado sobre una base giratoria.El problema es mantener el péndulo en posición vertical controlando la rotación de la base.
Los investigadores probaron el rendimiento de los controladores utilizando distintos escenarios de simulación.Las simulaciones revelaron que el controlador de estabilidad estabilizó efectivamente el sistema cuando el ángulo de desplazamiento inicial era pequeño, mientras que con ángulos iniciales más grandes, había más oscilaciones y el tiempo de estabilización era mayor.
El controlador óptimo abordó eficazmente el elevado tiempo de asentamiento, reduciéndolo de 13 a 2 segundos, lo que representa una reducción de seis veces.Además, también redujo las amplitudes máximas durante las oscilaciones.
El controlador óptimo robusto se probó utilizando dos escenarios diferentes.En el primer caso, se cambió la masa de la barra del péndulo, mientras que en el segundo, se introdujo ruido blanco en la entrada de control.En comparación con el controlador óptimo, funcionó igual en el primer escenario.Sin embargo, el controlador fue considerablemente mejor en el segundo escenario, ya que no mostró oscilaciones, mientras que el controlador óptimo mostró oscilaciones claras.En particular, el robusto-óptimocontroladormostraron los valores de error más bajos.Estos resultados resaltan la adaptabilidad y el potencial de estos controladores en escenarios prácticos.
"Los hallazgos de la investigación tienen implicaciones prometedoras para diversas aplicaciones de la vida real donde el control estable en entornos dinámicos e inciertos es primordial. Específicamente,vehículos autónomosy los robots industriales pueden lograr un mayor rendimiento y adaptabilidad utilizando los controladores propuestos", comenta el Dr. Bui.
"En general, nuestra investigación abre vías para avanzar en estrategias de control en diversos ámbitos, contribuyendo en última instancia a sistemas autónomos más capaces, haciendo que el transporte sea más seguro, la atención sanitaria más eficaz y la fabricación más eficiente".
Más información:Duc-Binh Pham et al, Control robusto y óptimo del control del péndulo invertido giratorio mediante técnicas basadas en descriptores difusos,Informes Científicos(2024).DOI: 10.1038/s41598-024-56202-2
Citación:Nuevos controladores robustos y óptimos basados en un sistema de descriptores difusos (8 de abril de 2024)recuperado el 8 de abril de 2024de https://techxplore.com/news/2024-04-robust-optimal-based-fuzzy-descriptor.html
Este documento está sujeto a derechos de autor.Aparte de cualquier trato justo con fines de estudio o investigación privados, noparte puede ser reproducida sin el permiso por escrito.El contenido se proporciona únicamente con fines informativos.