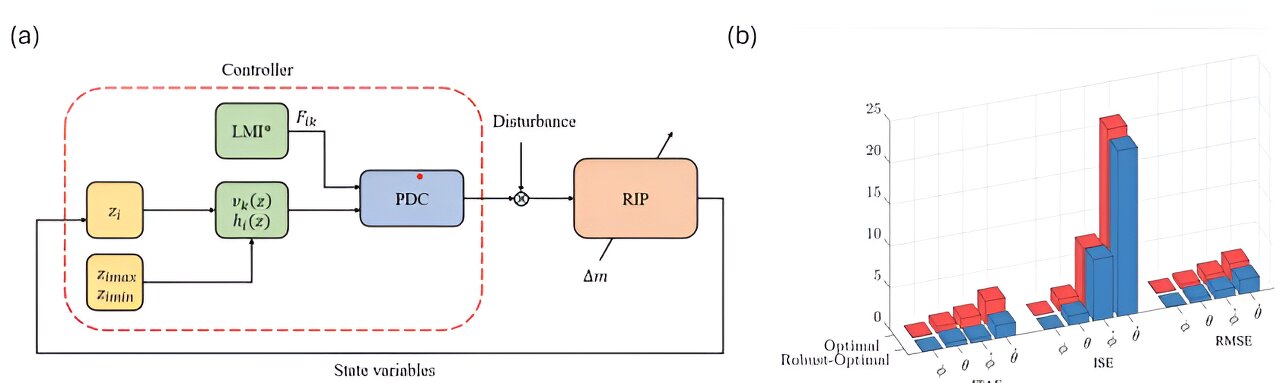
 The controller uses Parallel Distributed Compensator (PDC) as the control stratergy and Linear Matrix Inequality (LMI)-based stability conditions to achieve robust-optimal control. (b) The robust-optimal controller demonstrates lower error values in controlling the rotary inverted pendulum. Credit: Ngoc-Tam Bui, Shibaura Institute of Technology")
नॉनलाइनियर सिस्टम में रोबोटिक्स से लेकर अर्थशास्त्र तक कई विविध क्षेत्रों में अनुप्रयोग होते हैं।रैखिक प्रणालियों के विपरीत, ऐसी प्रणालियों में आउटपुट इनपुट के समानुपाती नहीं होता है।एक उत्कृष्ट उदाहरण पेंडुलम की गति है।अरेखीय प्रणालियों की अंतर्निहित प्रकृति के कारण, उनका गणितीय मॉडलिंग और, परिणामस्वरूप, नियंत्रण कठिन है।
इस संदर्भ में, ताकागी-सुगेनो (TâS) फ़ज़ी प्रणाली एक अत्यधिक प्रभावी उपकरण के रूप में उभरती है।यह प्रणाली लाभ पहुंचाती हैफजी लॉजिकएक गैर-रेखीय प्रणाली को कई रैखिक प्रणालियों के रूप में अनुमानित करने के लिए इनपुट और आउटपुट मानों को मैप करना, जिन्हें मॉडल करना आसान है।
फ़ज़ी लॉजिक गणितीय तर्क का एक रूप है जिसमें, सभी कथनों को सत्य (1) या गलत (0) होने की आवश्यकता के बजाय, सत्य मान 0 और 1 के बीच कोई भी मान हो सकता है। टीएएस फ़ज़ी प्रणाली ने इस प्रकार कार्य किया हैकई गैर-रेखीय नियंत्रण विधियों की नींव, जिसमें समानांतर वितरित कम्पेसाटर (पीडीसी) विधि सबसे प्रमुख है।
इसके अलावा, वैज्ञानिकों ने इस प्रणाली का एक उन्नत संस्करण विकसित किया है, जिसे फ़ज़ी डिस्क्रिप्टर सिस्टम (FDS) के रूप में जाना जाता है।यह टी'एस फ़ज़ी सिस्टम को शक्तिशाली स्पेस-स्टेट प्रतिनिधित्व के साथ जोड़ता है, जो राज्य चर, इनपुट चर और आउटपुट चर के संदर्भ में एक भौतिक प्रणाली का वर्णन करता है।
व्यापक शोध के बावजूद, TâS FDS के संदर्भ में इष्टतम नियंत्रण रणनीतियाँ अभी भी काफी हद तक अज्ञात हैं।इसके अतिरिक्त, जबकि मजबूत नियंत्रण विधियां, जो गड़बड़ी से बचाती हैं, रैखिक मैट्रिक्स असमानताओं (एलएमआई) जैसी विधियों का उपयोग करके टी'एस एफडीएस के लिए खोजी गई हैं, ये विधियां अतिरिक्त जटिलता और अनुकूलन चुनौतियां पेश करती हैं।
इन सीमाओं को दूर करने के लिए, जापान में शिबौरा इंस्टीट्यूट ऑफ टेक्नोलॉजी में इंजीनियरिंग कॉलेज के इनोवेटिव ग्लोबल प्रोग्राम के एसोसिएट प्रोफेसर न्गोक-टैम बुई के नेतृत्व में शोधकर्ताओं के एक समूह में थी-वान-अन्ह गुयेन, क्यू-थिन्ह दाओ और शामिल थे।हनोई यूनिवर्सिटी ऑफ साइंस एंड टेक्नोलॉजी के डक-बिन्ह फाम ने टीएएस फ़ज़ी डिस्क्रिप्टर मॉडल के आधार पर नए इष्टतम और मजबूत-इष्टतम नियंत्रक विकसित किए।उनका अध्ययनजर्नल में प्रकाशित किया गया थावैज्ञानिक रिपोर्ट.
नियंत्रकों को विकसित करने के लिए, टीम ने सबसे पहले एफडीएस के गणितीय मॉडल के लिए स्थिरता की स्थिति स्थापित करने के लिए शक्तिशाली ल्यपुनोव स्थिरता सिद्धांत का उपयोग किया।हालाँकि, इन स्थिरता स्थितियों का सीधे उपयोग नहीं किया जा सकता है।जैसा कि डॉ. बुई बताते हैं, "एफडीएस मॉडल के लिए स्थिरता की स्थिति स्थापित गणितीय उपकरणों का उपयोग करके हल करना कठिन बना देती है। उन्हें अधिक सुविधाजनक बनाने के लिए, हमने व्यवस्थित रूप से उन्हें एलएमआई में बदल दिया।"
इन संशोधित स्थितियों ने तीन नियंत्रकों को विकसित करने का आधार बनाया: स्थिरता नियंत्रक जो विचलन को प्रबंधित करने के लिए पीडीसी का उपयोग करता है, इष्टतम नियंत्रक जो इष्टतम नियंत्रण प्राप्त करने के लिए लागत फ़ंक्शन को कम करता है, और मजबूत-इष्टतम नियंत्रक जो इन दोनों के लाभों को जोड़ता है।
शोधकर्ताओं ने एक रोटरी उल्टे पेंडुलम को नियंत्रित करने में इन नियंत्रकों की प्रभावशीलता का प्रदर्शन किया, एक चुनौतीपूर्ण प्रणाली जिसमें एक घूर्णन आधार पर बैठा उलटा पेंडुलम शामिल है।समस्या आधार के घूर्णन को नियंत्रित करके पेंडुलम को सीधा रखने की है।
शोधकर्ताओं ने अलग-अलग सिमुलेशन परिदृश्यों का उपयोग करके नियंत्रकों के प्रदर्शन का परीक्षण किया।सिमुलेशन से पता चला कि प्रारंभिक विस्थापन कोण छोटा होने पर स्थिरता नियंत्रक ने सिस्टम को प्रभावी ढंग से स्थिर कर दिया, जबकि बड़े प्रारंभिक कोणों के साथ, अधिक दोलन थे, और निपटान का समय अधिक था।
उच्च निपटान समय को इष्टतम नियंत्रक द्वारा प्रभावी ढंग से संबोधित किया गया, इसे 13 से घटाकर 2 सेकंड कर दिया गया, जो छह गुना कमी का प्रतिनिधित्व करता है।इसके अलावा, इसने दोलन के दौरान अधिकतम आयाम को भी कम कर दिया।
मजबूत-इष्टतम नियंत्रक का परीक्षण दो अलग-अलग परिदृश्यों का उपयोग करके किया गया था।पहले मामले में, पेंडुलम बार का द्रव्यमान बदल दिया गया था, जबकि दूसरे में, नियंत्रण इनपुट में सफेद शोर पेश किया गया था।इष्टतम नियंत्रक की तुलना में, इसने पहले परिदृश्य में समान प्रदर्शन किया।हालाँकि, दूसरे परिदृश्य में नियंत्रक काफी बेहतर था, कोई दोलन नहीं दिखा रहा था जबकि इष्टतम नियंत्रक ने स्पष्ट दोलन दिखाया।विशेष रूप से, मजबूत-इष्टतमनियंत्रकसबसे कम त्रुटि मान दिखाए गए.ये परिणाम व्यावहारिक परिदृश्यों में इन नियंत्रकों की अनुकूलन क्षमता और क्षमता को उजागर करते हैं।
"शोध के निष्कर्ष विभिन्न वास्तविक जीवन अनुप्रयोगों के लिए आशाजनक निहितार्थ रखते हैं जहां गतिशील और अनिश्चित वातावरण में स्थिर नियंत्रण सर्वोपरि है। विशेष रूप से,स्वायत्त वाहनऔर औद्योगिक रोबोट प्रस्तावित नियंत्रकों का उपयोग करके उन्नत प्रदर्शन और अनुकूलनशीलता प्राप्त कर सकते हैं," डॉ. बुई टिप्पणी करते हैं।
"कुल मिलाकर, हमारा शोध विभिन्न डोमेन में नियंत्रण रणनीतियों को आगे बढ़ाने के रास्ते खोलता है, अंततः अधिक सक्षम स्वायत्त प्रणालियों में योगदान देता है, परिवहन को सुरक्षित बनाता है, स्वास्थ्य देखभाल को अधिक प्रभावी बनाता है, और विनिर्माण को अधिक कुशल बनाता है।"
अधिक जानकारी:डक-बिन्ह फाम एट अल, फ़ज़ी डिस्क्रिप्टर-आधारित तकनीकों के माध्यम से रोटरी उल्टे पेंडुलम नियंत्रण का मजबूत-इष्टतम नियंत्रण,वैज्ञानिक रिपोर्ट(2024)।डीओआई: 10.1038/एस41598-024-56202-2
उद्धरण:फ़ज़ी डिस्क्रिप्टर सिस्टम पर आधारित नवीन मजबूत-इष्टतम नियंत्रक (2024, 8 अप्रैल)8 अप्रैल 2024 को पुनः प्राप्तhttps://techxplore.com/news/2024-04-robust-optimal-आधारित-fuzzy-descriptor.html से
यह दस्तावेज कॉपीराइट के अधीन है।निजी अध्ययन या अनुसंधान के उद्देश्य से किसी भी निष्पक्ष व्यवहार के अलावा, नहींलिखित अनुमति के बिना भाग को पुन: प्रस्तुत किया जा सकता है।सामग्री केवल सूचना के प्रयोजनों के लिए प्रदान की गई है।