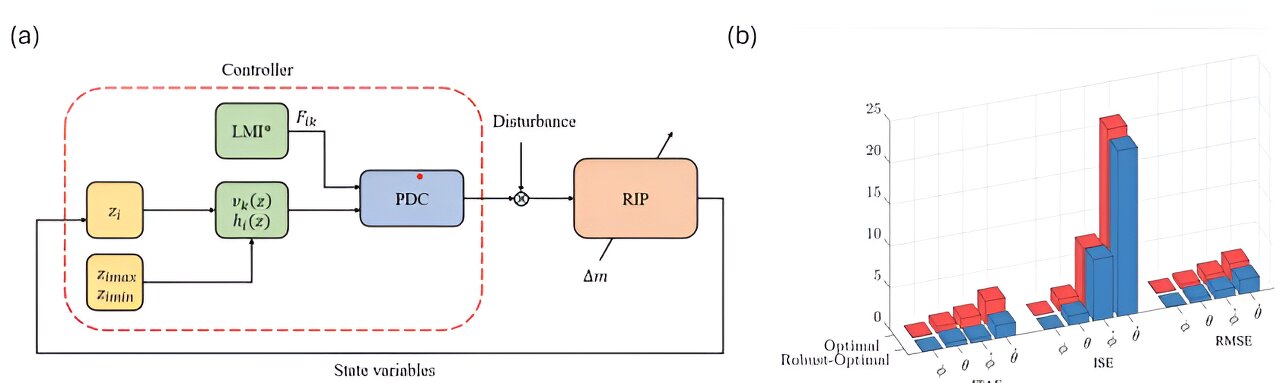
 The controller uses Parallel Distributed Compensator (PDC) as the control stratergy and Linear Matrix Inequality (LMI)-based stability conditions to achieve robust-optimal control. (b) The robust-optimal controller demonstrates lower error values in controlling the rotary inverted pendulum. Credit: Ngoc-Tam Bui, Shibaura Institute of Technology")
非線形システムは、ロボット工学から経済学に至るまで、多くの多様な分野に応用されています。線形システムとは異なり、このようなシステムでは出力が入力に比例しません。典型的な例は振り子の動きです。非線形システムの固有の性質により、その数学的モデリング、ひいては制御が困難です。
この文脈において、高木・菅野 (T・S) ファジィ システムが非常に効果的なツールとして浮上します。このシステムが活用しているのは、ファジーロジック入力値と出力値をマッピングして、非線形システムをモデル化が容易な複数の線形システムとして近似します。
ファジー ロジックは、すべてのステートメントが真 (1) または偽 (0) であることを要求するのではなく、真理値が 0 から 1 までの任意の値になることができる数学的論理の一形態です。したがって、TâS ファジー システムは次のような役割を果たしています。これはいくつかの非線形制御法の基礎であり、並列分布補償器 (PDC) 法が最も有名です。
さらに、科学者は、ファジー記述子システム (FDS) として知られる、このシステムの強化版を開発しました。これは、TâS ファジー システムと、状態変数、入力変数、出力変数の観点から物理システムを記述する強力な空間状態表現を組み合わせたものです。
広範な研究にもかかわらず、TâS FDS の状況における最適な制御戦略はまだほとんど解明されていません。さらに、線形行列不等式 (LMI) などの手法を使用して、外乱から保護する堅牢な制御手法が TâS FDS 向けに検討されてきましたが、これらの手法ではさらなる複雑さと最適化の課題が生じます。
これらの限界を克服するために、芝浦工業大学工学部イノベーティブ・グローバル・プログラムのゴク・タム・ブイ准教授率いる研究者グループと、ティ・ヴァン・アン・グエン氏、クイ・ティン・ダオ氏、Duc-Binh Pham 氏はいずれもハノイ科学技術大学出身で、TâS ファジー記述子モデルに基づいた新しい最適かつロバスト最適コントローラーを開発しました。彼らの研究雑誌に掲載されました科学レポート。
コントローラーを開発するために、チームはまず強力なリアプノフ安定理論を利用して、FDS の数学モデルの安定条件を確立しました。ただし、これらの安定条件をそのまま使用することはできません。ブイ博士は次のように説明しています。「FDS モデルの安定条件は、確立された数学的ツールを使用して解決することを困難にしています。それらをより使いやすいものにするために、私たちはそれらを体系的に LMI に変換しました。」
これらの修正された条件は、PDC を使用して偏差を管理する安定性コントローラー、最適な制御を得るためにコスト関数を最小化する最適コントローラー、およびその両方の利点を組み合わせたロバスト最適コントローラーの 3 つのコントローラーを開発するための基礎を形成しました。
研究者らは、回転倒立振子を制御する際のこれらのコントローラーの有効性を実証しました。回転倒立振子は、回転ベース上に置かれた倒立振子を含む挑戦的なシステムです。問題は、基部の回転を制御して振り子の直立を維持することです。
研究者らは、異なるシミュレーション シナリオを使用してコントローラーのパフォーマンスをテストしました。シミュレーションの結果、初期変位角が小さい場合には安定性コントローラーがシステムを効果的に安定化させる一方、初期角が大きくなると振動が増加し、整定時間が長くなることを明らかにしました。
長い整定時間は最適コントローラーによって効果的に対処され、13 秒から 2 秒に短縮され、6 分の 1 の短縮に相当します。さらに、発振時の最大振幅も減少しました。
堅牢最適コントローラーは、2 つの異なるシナリオを使用してテストされました。最初のケースでは振り子バーの質量が変更され、2 番目のケースではホワイト ノイズが制御入力に導入されました。最適なコントローラーと比較すると、最初のシナリオでは同じパフォーマンスを示しました。ただし、2 番目のシナリオではコントローラーの方が大幅に優れており、最適なコントローラーでは明らかな振動が見られたのに対し、振動は見られませんでした。特に、ロバスト最適化コントローラ最も低い誤差値を示しました。これらの結果は、実際のシナリオにおけるこれらのコントローラーの適応性と可能性を強調しています。
「この研究結果は、動的で不確実な環境における安定した制御が最も重要であるさまざまな現実のアプリケーションに有望な示唆をもたらします。具体的には、自動運転車産業用ロボットは、提案されたコントローラーを使用してパフォーマンスと適応性の向上を実現できます」とブイ博士は述べています。
「全体として、私たちの研究はさまざまな領域で制御戦略を進歩させる道を開き、最終的にはより有能な自律システム、輸送の安全性、医療の効果性、製造の効率性の向上に貢献します。」
詳細情報:Duc-Binh Pham 他、ファジー記述子ベースの技術による回転倒立振子制御のロバスト最適制御、科学レポート(2024年)。DOI: 10.1038/s41598-024-56202-2
引用:ファジー記述子システムに基づく新しいロバスト最適コントローラー (2024 年 4 月 8 日)2024 年 4 月 8 日に取得https://techxplore.com/news/2024-04-robust-optimal-based-fuzzy-descriptor.html より
この文書は著作権の対象です。個人的な研究や研究を目的とした公正な取引を除き、書面による許可なく一部を複製することができます。コンテンツは情報提供のみを目的として提供されています。