
自動駕駛汽車(AV)因其在提高安全性、降低能耗和優化交通流量方面的巨大潛力而成為智慧交通系統發展的關鍵環節。隨著自動駕駛汽車先進功能的增加,其運行階段的安全對於道路車輛產業至關重要。
然而,已經有幾個致命事故涉及自動駕駛汽車,凸顯了保證其安全的重要性和緊迫性。上述事故的原因可以歸結為自動駕駛汽車面臨的三個典型安全問題:功能安全、預期功能安全(SOTIF)和網路安全。
在這三個問題中,SOTIF 既是當前的學術研究熱點,也是 AV 應用的直接挑戰。SOTIF 旨在處理潛在的危險行為,包括與規格、性能和技術相關的不足或限制。態勢感知,有或沒有合理可預見的誤用,以及周圍的影響(例如其他用戶、被動基礎設施、天氣和電磁幹擾)。
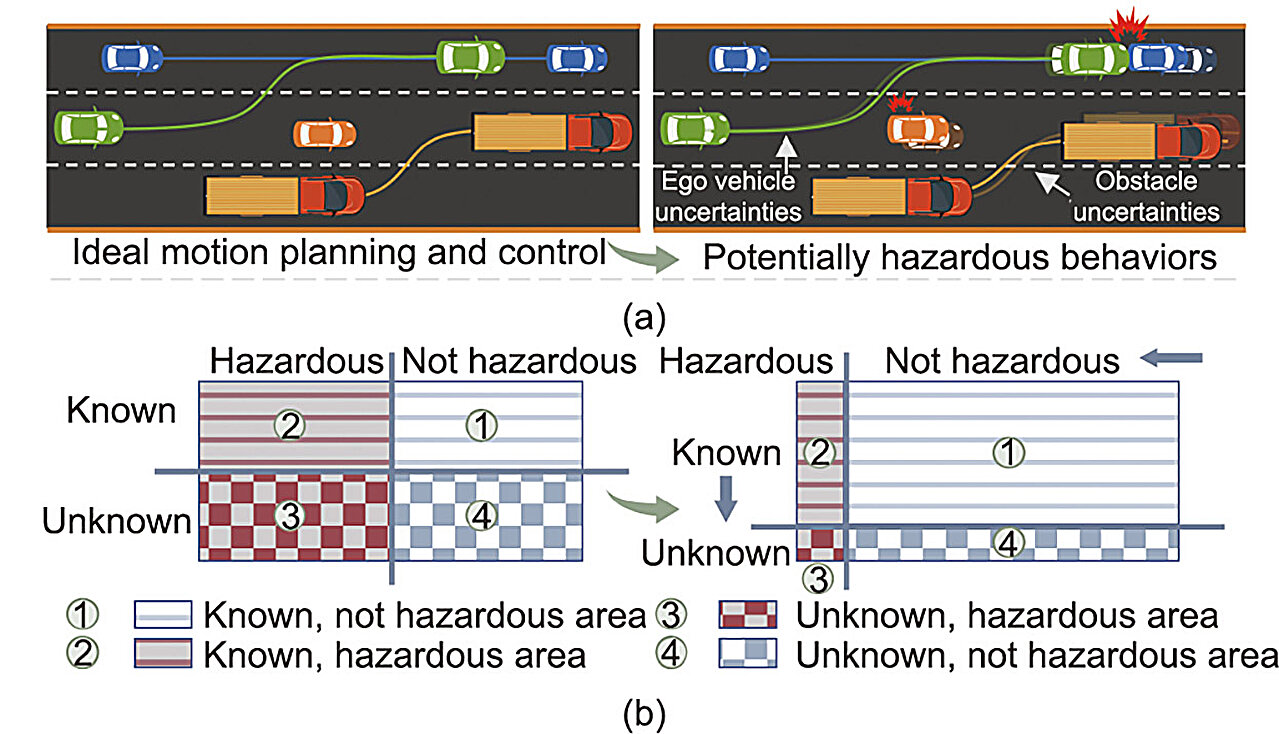
有鑑於此,一項研究發表在工程題為「採用 Zonotopic TRMPC 的自動駕駛車輛的安全運動規劃和控制框架」推斷,目前的運動規劃和控制技術也存在屬於 SOTIF 範圍的問題。例如,模型不匹配等不確定因素必然會導致未來的控制誤差,但規劃層並未考慮這些誤差在規劃週期內的影響。
本研究利用集合論、穩健控制理論和可及性分析提出了安全運動規劃與控制(SMPAC)框架,旨在增強多維不確定性下自動駕駛的SOTIF。
為了實現 SMPAC 框架,作者在自動駕駛的控制層和規劃層都採用了先進的方法。在控制層,他們利用集合論透過可達性分析來有效分析控制循環內所有可能的不確定性。
在此分析的基礎上,他們開發了一種靈活高效的基於管的魯棒模型預測控制器(TRMPC),確保將所有可能的不確定性未來演化收斂到最小的魯棒正不變集。同時,TRMPC 保證控制誤差在一定範圍內的傳播被限制在一個緊湊集合內。
轉向規劃層,作者引入了安全集的概念來描述自我車輛和障礙物的可到達的幾何邊界。安全集是根據從控制層誤差導出的有界緊集建構的。它們作為後續軌跡評估和選擇的基本結構。
綜上所述,控制層的zonotopic TRMPC和規劃層的安全集的深度整合確保了自動駕駛車輛的實際軌跡始終被限制在安全邊界內,從而增強了SOTIF。
在硬體在環實驗中,作者提供了兩種典型場景:極端操縱條件下的主動變換場景和正常操作條件下的防撞場景。這些實驗驗證了所提出的 SMPAC 框架的安全性、有效性和即時性。他們證明 SMPAC 可以減少自動駕駛中 SOTIF 類別內的潛在危險/未知區域。
作者鼓勵進一步的研究方向,包括:利用現代線性化方法對車輛系統進行建模,從而細化擾動集以減少 SMPAC 框架的保守性,並在 SMPAC 框架中嵌入最先進的運動規劃方法以進一步增強自動駕駛的能力。
更多資訊:鄭浩等人,採用 Zonotopic TRMPC 的自動駕駛汽車安全運動規劃與控制框架,工程(2024)。DOI:10.1016/j.eng.2023.12.003
提供者:工程
引文:應對自動駕駛挑戰:安全運動規劃與控制框架(2024 年,4 月 1 日)檢索日期:2024 年 4 月 1 日取自 https://techxplore.com/news/2024-04-automated-safe-motion-framework.html
本文檔受版權保護。除了出於私人學習或研究目的的任何公平交易外,不得未經書面許可,不得複製部分內容。所提供的內容僅供參考。