
सुरक्षा बढ़ाने, ऊर्जा की खपत कम करने और यातायात प्रवाह को अनुकूलित करने की अपनी विशाल क्षमता के कारण स्वचालित वाहन (एवी) बुद्धिमान परिवहन प्रणालियों के विकास में एक महत्वपूर्ण कड़ी बन गए हैं।एवी में शामिल उन्नत कार्यक्षमताओं की वृद्धि के साथ, उनके परिचालन चरण के दौरान सुरक्षा सड़क वाहन उद्योग के लिए सबसे महत्वपूर्ण है।
हालाँकि, वहाँ कई रहे हैंघातक दुर्घटनाएँएवी को शामिल करना, जो उनकी सुरक्षा की गारंटी के महत्व और तात्कालिकता को रेखांकित करता है।उपरोक्त दुर्घटनाओं के कारणों को एवी द्वारा सामना किए जाने वाले तीन विशिष्ट सुरक्षा मुद्दों को जिम्मेदार ठहराया जा सकता है: कार्यात्मक सुरक्षा, इच्छित कार्यक्षमता की सुरक्षा (एसओटीआईएफ) और साइबर सुरक्षा।
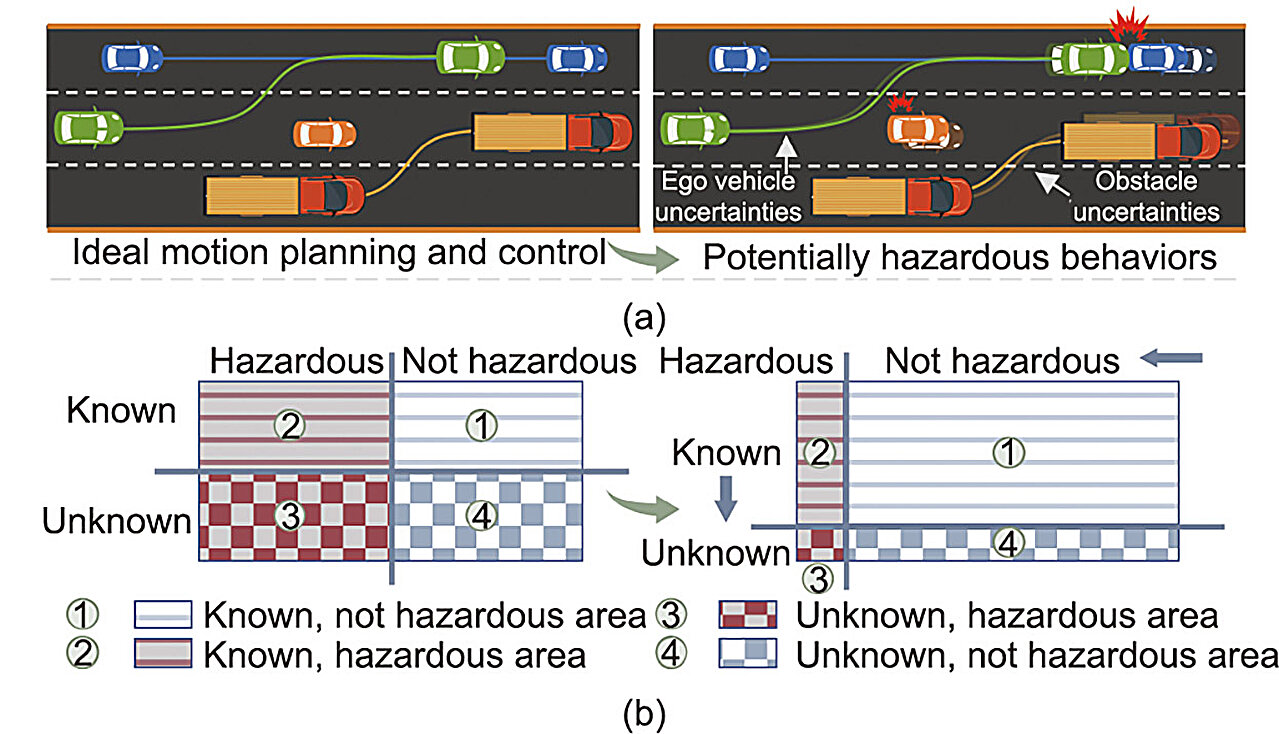
इन तीन मुद्दों में से, SOTIF एक वर्तमान शैक्षणिक अनुसंधान हॉटस्पॉट और AV अनुप्रयोगों के लिए एक तत्काल चुनौती दोनों के रूप में सामने आता है।SOTIF का उद्देश्य विशिष्टताओं, प्रदर्शन और से संबंधित अपर्याप्तताओं या सीमाओं सहित संभावित खतरनाक व्यवहारों को संभालना है।स्थिति के अनुसार जागरूकता, उचित रूप से पूर्वानुमानित दुरुपयोग के साथ या उसके बिना, और आसपास के प्रभाव (उदाहरण के लिए, अन्य उपयोगकर्ता, निष्क्रिय बुनियादी ढांचे, मौसम और विद्युत चुम्बकीय हस्तक्षेप)।
इस विचार को देखते हुए, एक अध्ययनप्रकाशितमेंइंजीनियरिंग"ज़ोनोटोपिक टीआरएमपीसी के साथ स्वचालित वाहनों के लिए सुरक्षित मोशन प्लानिंग और नियंत्रण फ्रेमवर्क" शीर्षक से यह निष्कर्ष निकाला गया कि वर्तमान मोशन प्लानिंग और नियंत्रण तकनीकें भी उन मुद्दों से ग्रस्त हैं जो SOTIF के दायरे में आते हैं।उदाहरण के लिए, मॉडल बेमेल जैसी अनिश्चितताएं अनिवार्य रूप से भविष्य में नियंत्रण त्रुटियों को जन्म देंगी, हालांकि, नियोजन परत नियोजन चक्र के भीतर इन त्रुटियों के प्रभाव पर विचार नहीं करती है।
यह अध्ययन एक सुरक्षित गति योजना और नियंत्रण (एसएमपीएसी) ढांचे का प्रस्ताव करने के लिए सेट सिद्धांत, मजबूत नियंत्रण सिद्धांत और पहुंच योग्यता विश्लेषण का लाभ उठाता है, जिसका लक्ष्य बहु-आयामी अनिश्चितताओं के तहत स्वचालित ड्राइविंग के एसओटीआईएफ को बढ़ाना है।
एसएमपीएसी ढांचे को साकार करने के लिए, लेखक स्वचालित ड्राइविंग के नियंत्रण और नियोजन दोनों स्तरों पर उन्नत पद्धतियों को नियोजित करते हैं।नियंत्रण स्तर पर, वे रीचैबिलिटी विश्लेषण के माध्यम से नियंत्रण लूप के भीतर सभी संभावित अनिश्चितताओं का कुशलतापूर्वक विश्लेषण करने के लिए सेट सिद्धांत का लाभ उठाते हैं।
इस विश्लेषण के आधार पर, वे एक लचीला और कुशल ट्यूब-आधारित मजबूत मॉडल प्रेडिक्टिव कंट्रोलर (टीआरएमपीसी) विकसित करते हैं, जो सभी संभावित अनिश्चितताओं के भविष्य के विकास को न्यूनतम मजबूत सकारात्मक रूप से अपरिवर्तनीय सेट में अभिसरण सुनिश्चित करता है।साथ ही, टीआरएमपीसी गारंटी देता है कि एक निश्चित क्षितिज पर नियंत्रण त्रुटियों का प्रसार एक कॉम्पैक्ट सेट के भीतर सीमित है।
नियोजन परत की ओर बढ़ते हुए, लेखक अहंकार वाहन और बाधाओं की पहुंच योग्य ज्यामितीय सीमाओं का वर्णन करने के लिए सुरक्षा सेट की एक अवधारणा पेश करते हैं।सुरक्षा सेट का निर्माण नियंत्रण परत त्रुटियों से प्राप्त बाउंडेड कॉम्पैक्ट सेट के अनुसार किया जाता है।वे बाद के प्रक्षेप पथ मूल्यांकन और चयन के लिए मौलिक निर्माण के रूप में कार्य करते हैं।
संक्षेप में, नियंत्रण स्तर पर ज़ोनोटोपिक टीआरएमपीसी का गहरा एकीकरण और नियोजन स्तर पर सुरक्षा सेट यह सुनिश्चित करता है कि स्वचालित वाहनों के वास्तविक प्रक्षेप पथ हमेशा सुरक्षित सीमाओं के भीतर बाधित होते हैं, जिससे SOTIF में वृद्धि होती है।
हार्डवेयर-इन-द-लूप प्रयोगों में, लेखक दो विशिष्ट परिदृश्य प्रदान करते हैं: अत्यधिक पैंतरेबाज़ी स्थितियों के तहत एक सक्रिय लेन-परिवर्तन परिदृश्य और सामान्य परिचालन स्थितियों के तहत टकराव से बचाव परिदृश्य।ये प्रयोग प्रस्तावित एसएमपीएसी ढांचे की सुरक्षा, प्रभावशीलता और वास्तविक समय के प्रदर्शन को मान्य करते हैं।वे प्रदर्शित करते हैं कि SMPAC स्वचालित ड्राइविंग में SOTIF की श्रेणियों के भीतर संभावित खतरनाक/अज्ञात क्षेत्रों को कम कर सकता है।
लेखक आगे अनुसंधान दिशाओं को प्रोत्साहित करते हैं, जिनमें शामिल हैं: वाहन प्रणालियों को मॉडल करने के लिए आधुनिक रैखिककरण विधियों का उपयोग करना, जिससे एसएमपीएसी ढांचे की रूढ़िवादिता को कम करने के लिए गड़बड़ी सेट को परिष्कृत करना और एसएमपीएसी ढांचे के भीतर अत्याधुनिक गति नियोजन विधियों को और अधिक बढ़ाने के लिए एम्बेड करना।स्वचालित ड्राइविंग की क्षमताएँ।
अधिक जानकारी:हाओ झेंग एट अल, ज़ोनोटोपिक टीआरएमपीसी के साथ स्वचालित वाहनों के लिए सुरक्षित गति योजना और नियंत्रण ढांचा,इंजीनियरिंग(2024)।डीओआई: 10.1016/j.eng.2023.12.003
द्वारा उपलब्ध कराया गयाइंजीनियरिंग
उद्धरण:स्वचालित ड्राइविंग में चुनौतियों का समाधान: एक सुरक्षित गति योजना और नियंत्रण ढांचा (2024, 1 अप्रैल)1 अप्रैल 2024 को पुनः प्राप्तhttps://techxplore.com/news/2024-04-automated-safe-motion-framework.html से
यह दस्तावेज कॉपीराइट के अधीन है।निजी अध्ययन या अनुसंधान के उद्देश्य से किसी भी निष्पक्ष व्यवहार के अलावा, नहींलिखित अनुमति के बिना भाग को पुन: प्रस्तुत किया जा सकता है।सामग्री केवल सूचना के प्रयोजनों के लिए प्रदान की गई है।