
自動運転車 (AV) は、安全性を向上させ、エネルギー消費を削減し、交通の流れを最適化する大きな可能性があるため、インテリジェント交通システムの開発において重要なリンクとなっています。AV に含まれる高度な機能が増加するにつれ、道路運送車両業界にとって、その運用段階における安全性が最も重要になります。
ただし、いくつかありました死亡事故これは AV の安全を保証することの重要性と緊急性を強調しています。上記の事故の理由は、AV が直面する 3 つの典型的な安全上の問題、つまり機能安全、意図された機能の安全 (SOTIF)、およびサイバーセキュリティに起因すると考えられます。
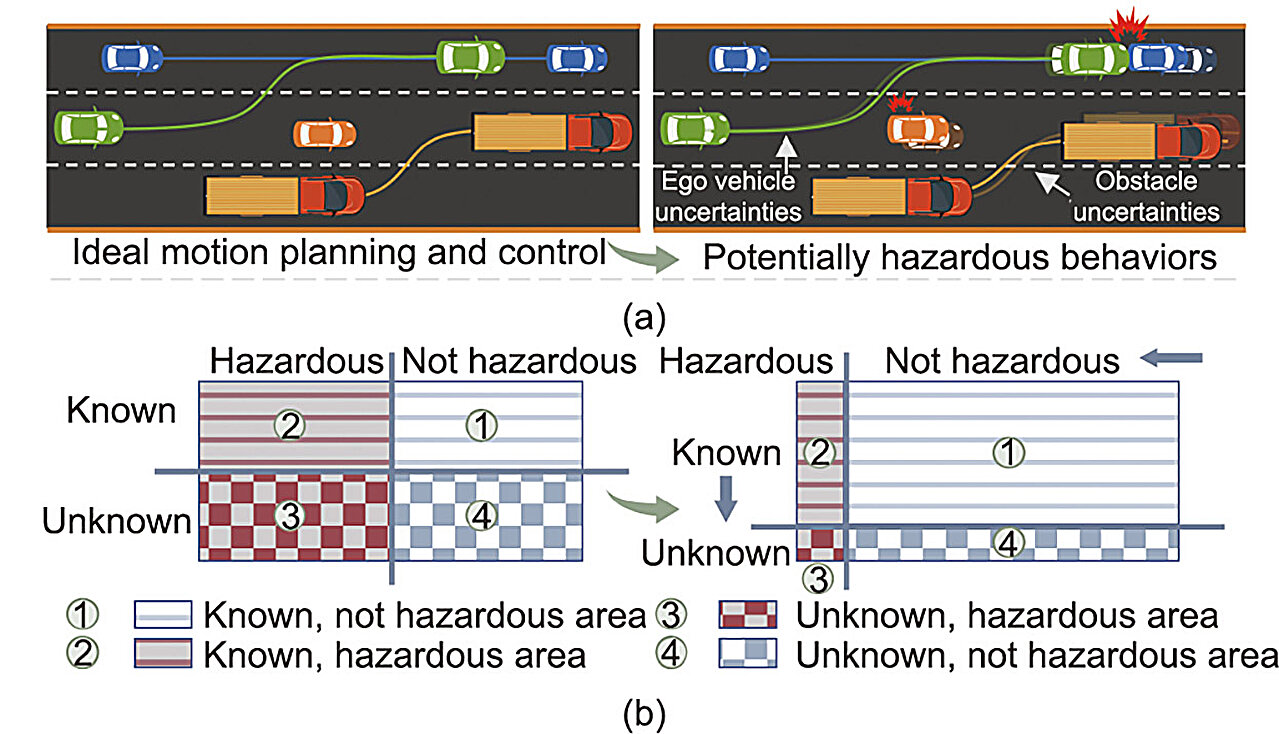
これら 3 つの問題の中で、SOTIF は、現在の学術研究のホットスポットであると同時に、AV アプリケーションに対する当面の課題としても際立っています。SOTIF は、仕様、性能、および仕様に関する不十分または制限を含む、潜在的に危険な行為に対処することを目的としています。状況認識、合理的に予見可能な誤用の有無にかかわらず、周囲の影響(他のユーザー、受動的インフラストラクチャ、天候、電磁干渉など)。
このことを考慮すると、ある研究では、出版されたでエンジニアリング「Zotopic TRMPC を使用した自動車両のための安全な動作計画および制御フレームワーク」と題された研究では、現在の動作計画および制御技術にも SOTIF の範囲内に含まれる問題があると推定されています。たとえば、モデルの不一致などの不確実性は、将来的に制御エラーにつながることは避けられませんが、計画レイヤーは計画サイクル内でこれらのエラーの影響を考慮しません。
この研究は、集合理論、ロバスト制御理論、および到達可能性分析を活用して、安全運動計画および制御 (SMPAC) フレームワークを提案し、多次元の不確実性の下での自動運転の SOTIF を強化することを目的としています。
SMPAC フレームワークを実現するために、著者らは自動運転の制御層と計画層の両方で高度な方法論を採用しています。制御層では、集合論を活用して、到達可能性分析を通じて制御ループ内で考えられるすべての不確実性を効率的に分析します。
この分析に基づいて、彼らは柔軟で効率的なチューブベースのロバストモデル予測コントローラー (TRMPC) を開発し、考えられるすべての不確実性の将来の展開を最小限のロバストな正の不変集合に確実に収束させます。同時に、TRMPC は、特定の範囲にわたる制御エラーの伝播がコンパクトなセット内に制限されることを保証します。
計画層に移り、著者らは、自車両と障害物の到達可能な幾何学的境界を記述する安全セットの概念を導入します。セーフティ セットは、制御層エラーから導出された有界コンパクト セットに従って構築されます。これらは、その後の軌道の評価と選択のための基本的な構成要素として機能します。
要約すると、制御層のゾーントピック TRMPC と計画層の安全セットの緊密な統合により、自動運転車両の実際の軌道が常に安全な境界内に制約されることが保証され、それによって SOTIF が強化されます。
ハードウェアインザループの実験では、著者らは 2 つの典型的なシナリオを提供します。1 つは極端な操縦条件下でのアクティブな車線変更シナリオ、もう 1 つは通常の動作条件下での衝突回避シナリオです。これらの実験は、提案された SMPAC フレームワークの安全性、有効性、およびリアルタイム パフォーマンスを検証します。これらは、SMPAC が自動運転における SOTIF のカテゴリー内の潜在的な危険領域/未知の領域を削減できることを実証しています。
著者らは、最新の線形化手法を車両システムのモデル化に利用し、それによって外乱セットを改良して SMPAC フレームワークの保守主義を軽減し、最先端の動作計画手法を SMPAC フレームワーク内に埋め込んで、車両システムのモデル化をさらに強化することを含む、さらなる研究の方向性を奨励しています。自動運転の可能性。
詳細情報:Hao Zheng 他、Zonotopic TRMPC を使用した自動車両のための安全な動作計画および制御フレームワーク、エンジニアリング(2024年)。DOI: 10.1016/j.eng.2023.12.003
提供元エンジニアリング
引用:自動運転の課題への対処: 安全な動作計画と制御のフレームワーク (2024 年 4 月 1 日)2024 年 4 月 1 日に取得https://techxplore.com/news/2024-04-automated-safe-motion-framework.html より
この文書は著作権の対象です。個人的な研究や研究を目的とした公正な取引を除き、書面による許可なく一部を複製することができます。コンテンツは情報提供のみを目的として提供されています。