
Los vehículos automatizados (AV) se han convertido en un eslabón fundamental en el desarrollo de sistemas de transporte inteligentes debido a su enorme potencial para mejorar la seguridad, reducir el consumo de energía y optimizar el flujo de tráfico.Con el aumento de las funcionalidades avanzadas incluidas en los vehículos autónomos, la seguridad durante su fase operativa es de suma importancia para la industria de vehículos de carretera.
Sin embargo, ha habido variosaccidentes fatalesque involucran vehículos autónomos, lo que subraya la importancia y urgencia de garantizar su seguridad.Las razones de los accidentes mencionados anteriormente pueden atribuirse a tres problemas de seguridad típicos que enfrentan los vehículos autónomos: seguridad funcional, seguridad de la funcionalidad prevista (SOTIF) y ciberseguridad.
Entre estos tres temas, el SOTIF se destaca como un foco de investigación académica actual y un desafío inmediato para las aplicaciones AV.El SOTIF tiene como objetivo manejar comportamientos potencialmente peligrosos, incluyendo insuficiencias o limitaciones relacionadas con las especificaciones, desempeño yconciencia situacional, con o sin mal uso razonablemente previsible, y los impactos circundantes (por ejemplo, otros usuarios, infraestructura pasiva, clima e interferencia electromagnética).
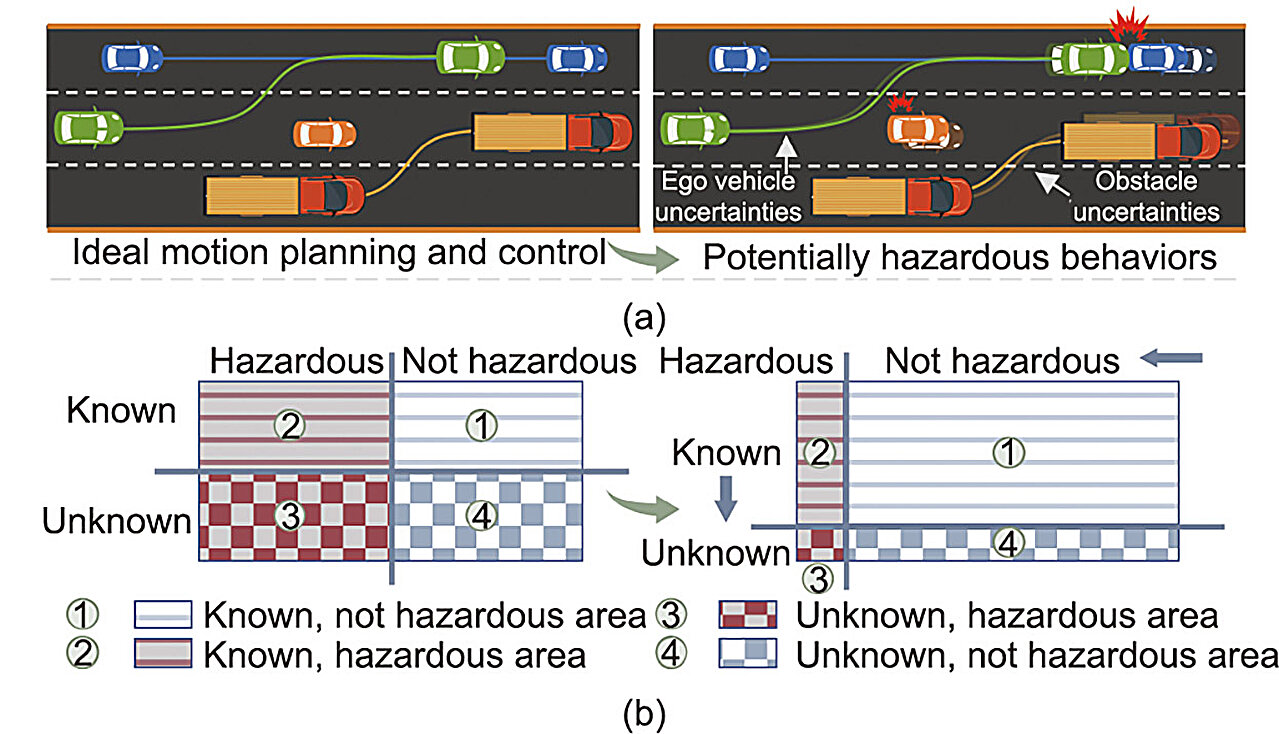
Teniendo en cuenta esta consideración, un estudiopublicadoenIngenieríatitulado "Marco de control y planificación del movimiento seguro para vehículos automatizados con Zonotopic TRMPC" dedujo que las técnicas actuales de planificación y control del movimiento también adolecen de problemas que entran dentro del alcance del SOTIF.Por ejemplo, incertidumbres como los desajustes de los modelos conducirán inevitablemente a errores de control en el futuro; sin embargo, la capa de planificación no considera el impacto de estos errores dentro del ciclo de planificación.
Este estudio aprovecha la teoría de conjuntos, la teoría de control robusto y el análisis de accesibilidad para proponer un marco de control y planificación de movimiento seguro (SMPAC), con el objetivo de mejorar el SOTIF de la conducción automatizada bajo incertidumbres multidimensionales.
Para realizar el marco SMPAC, los autores emplean metodologías avanzadas tanto en el nivel de control como en el de planificación de la conducción automatizada.En la capa de control, aprovechan la teoría de conjuntos para analizar de manera eficiente todas las posibles incertidumbres dentro del circuito de control mediante el análisis de accesibilidad.
Sobre la base de este análisis, desarrollan un controlador predictivo de modelo robusto basado en tubos (TRMPC), flexible y eficiente, que garantiza la convergencia de todas las posibles evoluciones futuras de las incertidumbres a un conjunto mínimo, robusto y positivamente invariante.Al mismo tiempo, el TRMPC garantiza que la propagación de errores de control a lo largo de un determinado horizonte esté limitada dentro de un conjunto compacto.
Pasando a la capa de planificación, los autores introducen un concepto de conjunto de seguridad para describir los límites geométricos alcanzables del vehículo del ego y los obstáculos.Los conjuntos de seguridad se construyen de acuerdo con el conjunto compacto acotado derivado de los errores de la capa de control.Sirven como constructos fundamentales para la posterior evaluación y selección de trayectorias.
En resumen, la profunda integración del TRMPC zonotópico en la capa de control y los conjuntos de seguridad en la capa de planificación garantiza que las trayectorias reales de los vehículos automatizados siempre estén restringidas dentro de límites seguros, mejorando así el SOTIF.
En experimentos de hardware-in-the-loop, los autores proporcionan dos escenarios típicos: un escenario de cambio de carril activo en condiciones de maniobra extremas y un escenario de evitación de colisiones en condiciones normales de funcionamiento.Estos experimentos validan la seguridad, eficacia y rendimiento en tiempo real del marco SMPAC propuesto.Demuestran que el SMPAC puede reducir las regiones potencialmente peligrosas/desconocidas dentro de las categorías de SOTIF en la conducción automatizada.
Los autores alientan nuevas direcciones de investigación, que incluyen: Utilizar métodos modernos de linealización para modelar sistemas de vehículos, refinando así los conjuntos de perturbaciones para reducir el conservadurismo del marco SMPAC e incorporando métodos de planificación de movimiento de última generación dentro del marco SMPAC para mejorar aún más lacapacidades de la conducción automatizada.
Más información:Hao Zheng et al, Marco de control y planificación de movimiento seguro para vehículos automatizados con Zonotopic TRMPC,Ingeniería(2024).DOI: 10.1016/j.eng.2023.12.003
Proporcionado porIngeniería
Citación:Abordar los desafíos de la conducción automatizada: un marco de control y planificación del movimiento seguro (2024, 1 de abril)recuperado el 1 de abril de 2024de https://techxplore.com/news/2024-04-automated-safe-motion-framework.html
Este documento está sujeto a derechos de autor.Aparte de cualquier trato justo con fines de estudio o investigación privados, noparte puede ser reproducida sin el permiso por escrito.El contenido se proporciona únicamente con fines informativos.