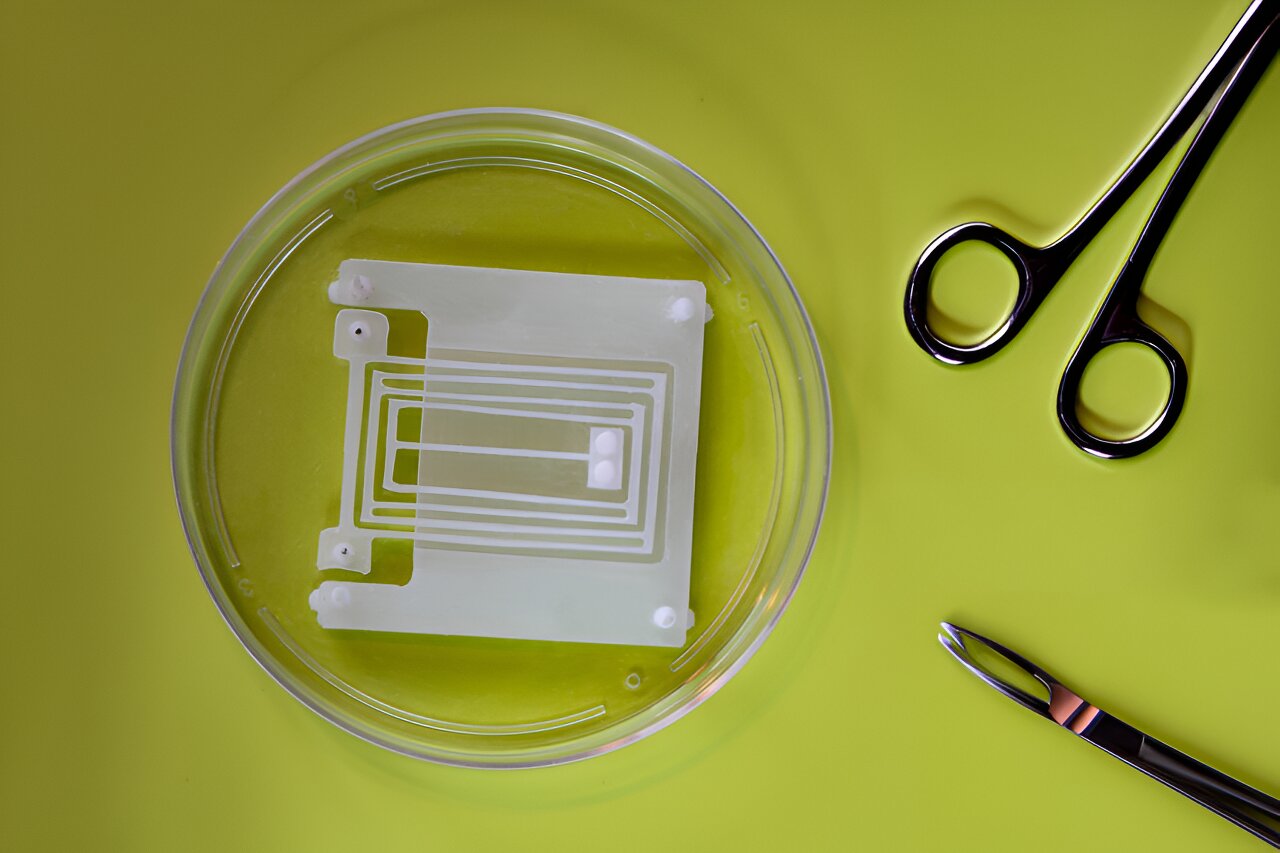
 that maximizes the work of natural muscles. When living muscle tissue is attached to posts at the corners of the device, the muscle’s contractions pull on the spring, forming an effective, natural actuator. The spring can serve as a “skeleton†for future muscle-powered robots. Credits: Felice Frankel")
我們的肌肉是大自然完美的致動器-將能量轉化為運動的裝置。就其尺寸而言,肌纖維比大多數合成致動器更強大、更精確。他們甚至可以透過運動來治癒損傷並變得更強壯。
基於這些原因,工程師們正在探索利用天然肌肉為機器人提供動力的方法。他們展示了一些「生物混合」機器人,這些機器人使用基於肌肉的執行器為人造骨骼提供動力,以行走、游泳、泵動和抓握。但對於每個機器人來說,都有一個非常不同的構造,並且對於如何在任何給定的機器人設計中充分利用肌肉沒有通用的藍圖。
現在,麻省理工學院的工程師開發了一種類似彈簧的設備,可以用作幾乎所有肌肉機器人的基本骨架式模組。新的彈簧或“彎曲彈簧”旨在充分利用任何附著的肌肉組織。就像適合適當重量的腿舉一樣,該設備可以最大限度地提高肌肉自然產生的運動量。
研究人員發現,當他們將一圈肌肉組織安裝到該設備上時,就像一個橡皮筋與之前的其他設備設計相比,肌肉圍繞著兩個柱子拉伸,可靠且反覆地拉動彈簧,並將彈簧拉伸五倍。
該團隊將撓性設計視為一種新的構建塊,可以與其他撓性結合起來構建任何配置的人工骨骼。然後,工程師可以在骨骼上安裝肌肉組織,為它們的運動提供動力。
麻省理工學院工程設計專業職業發展教授 Ritu Raman 表示:“這些彎曲部分就像一個骨架,人們現在可以用它以一種非常可預測的方式將肌肉驅動轉變為多個運動自由度。”“我們正在為機器人專家提供一套新的規則,以製造強大而精確的肌肉動力機器人,它們可以做有趣的事情。”
拉曼和她的同事在一份報告中報告了新撓性設計的細節紙今天出現在雜誌上先進的智慧系統。研究的麻省理工學院合著者包括 Naomi Lynch '12、SM '23;塔拉希恩 (Tara Sheehan) 本科生;研究生尼古拉斯·卡斯特羅、勞拉·羅薩多和布蘭登·裡奧斯;機械工程教授馬丁‧卡爾佩珀 (Martin Culpepper)。
肌肉拉力
當在有利條件下單獨留在培養皿中時,肌肉組織會自行收縮,但收縮方向不完全可預測或沒有多大用處。
拉曼說:“如果肌肉沒有附著在任何東西上,它會移動很多,但變化很大,它只是在液體中擺動。”
工程師通常將一條肌肉組織連接在兩個小而靈活的柱子之間,以使肌肉像機械致動器一樣工作。當肌肉帶自然收縮時,它可以彎曲柱子並將它們拉到一起,產生一些運動,理想地為機器人骨架的一部分提供動力。然而,在這些設計中,肌肉產生的運動有限,主要是因為組織與柱的接觸方式變化很大。
根據肌肉放置在立柱上的位置以及肌肉表面接觸立柱的程度,肌肉可能會成功地將立柱拉到一起,但有時可能會以無法控制的方式擺動。
拉曼的團隊希望設計一種骨骼,無論肌肉放置在骨骼上的具體位置和方式如何,都能集中並最大化肌肉的收縮,從而以可預測、可靠的方式產生最大的運動。
“問題是:我們如何設計一個能夠最有效地利用肌肉產生的力量的骨骼?”拉曼說。
研究人員首先考慮了肌肉可以自然移動的多個方向。他們推斷,如果肌肉要將兩個柱子沿特定方向拉到一起,則柱子應該連接到彈簧,僅允許它們在拉動時沿該方向移動。
拉曼說:「我們需要一種在一個方向上非常柔軟和靈活,而在所有其他方向上都非常堅硬的裝置,這樣當肌肉收縮時,所有的力都能有效地轉化為一個方向的運動。 」
柔軟的彈性
事實證明,拉曼在馬丁卡爾佩珀教授的實驗室中發現了許多這樣的設備。麻省理工學院的卡爾佩珀團隊專門從事機器元件的設計和製造,例如微型致動器、軸承和其他可以內置到機器和系統中的機構,以便為各種應用實現超精確的運動、測量和控制。
該小組的精密加工元件包括撓性彈簧裝置,通常由平行梁製成,可以奈米精度彎曲和拉伸。
「根據樑的厚度和距離,你可以改變彈簧的硬度,」拉曼說。
她和卡爾佩珀聯手設計了一種專門定制的彎曲件,其配置和剛度使肌肉組織能夠自然收縮並最大程度地拉伸彈簧。團隊根據大量計算設計了設備的配置和尺寸,將肌肉的自然力與彎曲的剛度和運動程度聯繫起來。
他們最終設計的彎曲度是肌肉組織本身剛度的 1/100。該設備類似於一個微型的手風琴狀結構,其角落透過一根小柱固定在底層底座上,該小柱位於直接安裝在底座上的相鄰柱附近。
然後拉曼將一條肌肉帶纏繞在兩個角柱上(該團隊根據現場情況塑造了這些帶子)肌肉纖維它們是從小鼠細胞中生長出來的),並測量了當肌肉帶收縮時,柱子拉在一起的距離。
研究團隊發現,彎曲部分的配置使肌帶主要沿著兩個柱子之間的方向收縮。與先前的肌肉執行器設計相比,這種集中收縮使肌肉能夠將柱子拉得更近,距離近五倍。
拉曼說:“我們設計的柔性骨架是一種骨架,在一個方向上非常柔軟且靈活,而在所有其他方向上都非常堅硬。”“當肌肉收縮時,所有的力都會轉化為那個方向的運動。這是一個巨大的放大。”
研究小組發現他們可以使用該設備來精確測量肌肉表現和耐力。當他們改變肌肉收縮的頻率時(例如,刺激帶子每秒收縮一次與四次),他們觀察到肌肉在較高頻率下“變得疲勞”,並且不會產生那麼多的拉力。
「看看我們的肌肉疲勞的速度有多快,以及我們如何鍛鍊它們以獲得高耐力反應——這就是我們可以透過這個平台發現的內容,」拉曼說。
研究人員現在正在調整和組合彎曲部分,以建造由自然肌肉驅動的精確、鉸接且可靠的機器人。
拉曼說:“我們未來試圖製造的機器人的一個例子是外科手術機器人,它可以在體內執行微創手術。”“從技術上講,肌肉可以為任何尺寸的機器人提供動力,但我們對製造小型機器人感到特別興奮,因為這是生物執行器在強度、效率和適應性方面表現出色的地方。”
更多資訊:Naomi Lynch 等人,增強和解碼帶有彎曲部分的肌肉致動器的性能,先進的智慧系統(2024)。DOI:10.1002/aisy.202300834
這個故事由麻省理工學院新聞轉載(web.mit.edu/新聞辦公室/),一個熱門網站,涵蓋有關麻省理工學院研究、創新和教學的新聞。
引文:工程師為軟體、肌肉驅動的機器人設計靈活的「骨骼」(2024 年,4 月 8 日)檢索日期:2024 年 4 月 8 日來自 https://techxplore.com/news/2024-04-flexible-骨骼-soft-muscle-powered.html
本文檔受版權保護。除了出於私人學習或研究目的的任何公平交易外,不得未經書面許可,不得複製部分內容。所提供的內容僅供參考。