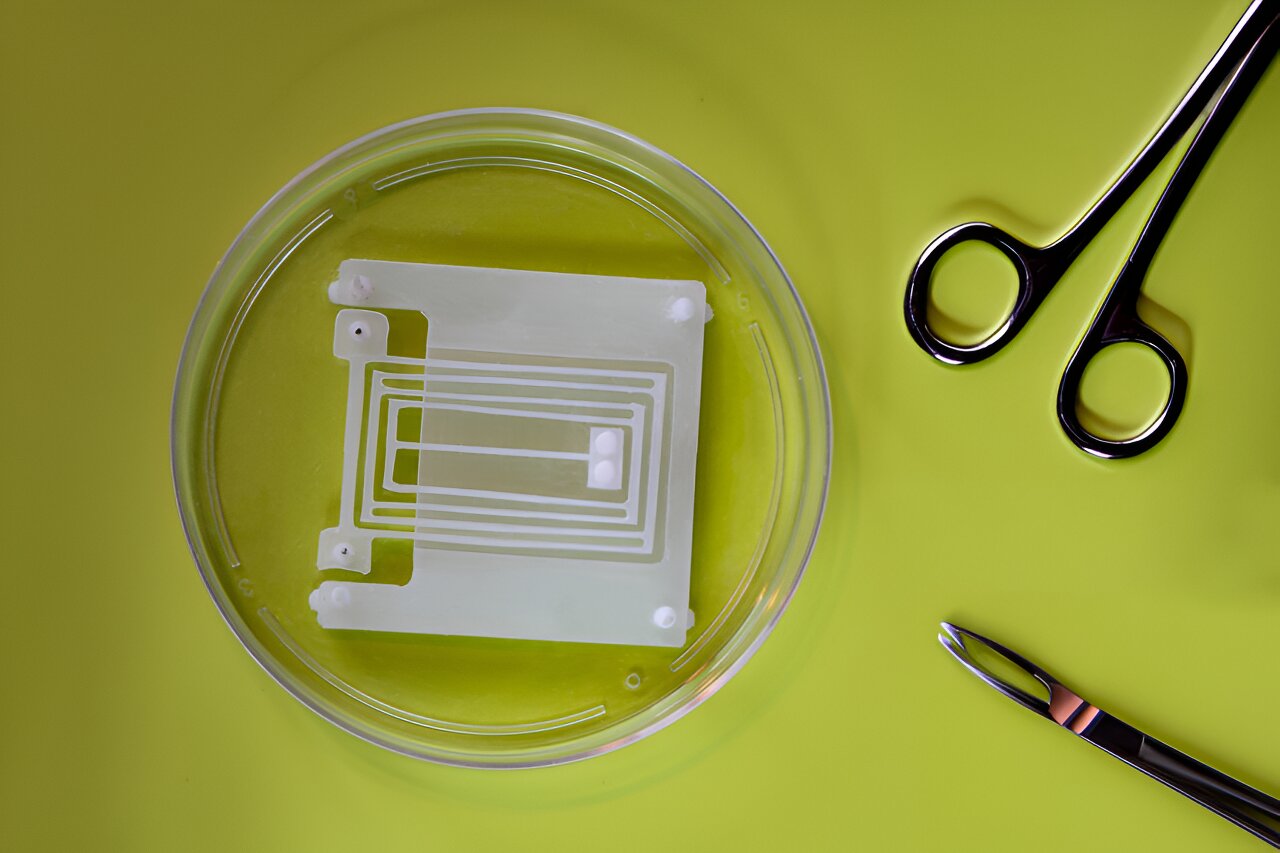
 that maximizes the work of natural muscles. When living muscle tissue is attached to posts at the corners of the device, the muscle’s contractions pull on the spring, forming an effective, natural actuator. The spring can serve as a “skeleton†for future muscle-powered robots. Credits: Felice Frankel")
हमारी मांसपेशियाँ प्रकृति की सर्वोत्तम प्रेरक-उपकरण हैं जो ऊर्जा को गति में बदल देती हैं।अपने आकार के लिए, मांसपेशी फाइबर अधिकांश सिंथेटिक एक्चुएटर्स की तुलना में अधिक शक्तिशाली और सटीक होते हैं।वे क्षति से भी उबर सकते हैं और व्यायाम से मजबूत हो सकते हैं।
इन कारणों से, इंजीनियर प्राकृतिक मांसपेशियों से रोबोट को शक्ति देने के तरीके तलाश रहे हैं।उन्होंने मुट्ठी भर "बायोहाइब्रिड" रोबोटों का प्रदर्शन किया है जो चलने, तैरने, पंप करने और पकड़ने वाले कृत्रिम कंकालों को शक्ति देने के लिए मांसपेशियों पर आधारित एक्चुएटर्स का उपयोग करते हैं।लेकिन प्रत्येक बॉट के लिए, एक बहुत अलग निर्माण होता है और किसी दिए गए रोबोट डिज़ाइन के लिए मांसपेशियों से अधिकतम लाभ कैसे प्राप्त किया जाए, इसका कोई सामान्य खाका नहीं होता है।
अब, एमआईटी इंजीनियरों ने एक स्प्रिंग-जैसी डिवाइस विकसित की है जिसका उपयोग लगभग किसी भी मांसपेशी-बाउंड बॉट के लिए बुनियादी कंकाल-जैसे मॉड्यूल के रूप में किया जा सकता है।नया स्प्रिंग, या "फ्लेक्सचर", किसी भी संलग्न मांसपेशी ऊतक से अधिकतम कार्य प्राप्त करने के लिए डिज़ाइन किया गया है।एक लेग प्रेस की तरह जो सही मात्रा में वजन के साथ फिट होता है, यह उपकरण मांसपेशियों द्वारा स्वाभाविक रूप से उत्पन्न होने वाली गति की मात्रा को अधिकतम करता है।
शोधकर्ताओं ने पाया कि जब वे डिवाइस पर मांसपेशियों के ऊतकों की एक अंगूठी फिट करते हैं, तो बहुत कुछ वैसा ही होता हैरबर बैंडदो पदों के आसपास फैला हुआ, मांसपेशी स्प्रिंग पर विश्वसनीय रूप से और बार-बार खींचती है और अन्य पिछले डिवाइस डिज़ाइन की तुलना में इसे पांच गुना अधिक खींचती है।
टीम फ्लेक्सचर डिज़ाइन को एक नए बिल्डिंग ब्लॉक के रूप में देखती है जिसे कृत्रिम कंकालों के किसी भी कॉन्फ़िगरेशन को बनाने के लिए अन्य फ्लेक्सचर्स के साथ जोड़ा जा सकता है।फिर इंजीनियर अपनी गतिविधियों को शक्ति प्रदान करने के लिए कंकालों को मांसपेशियों के ऊतकों के साथ फिट कर सकते हैं।
एमआईटी में इंजीनियरिंग डिजाइन में ब्रिटिश और एलेक्स डी'अर्बेलॉफ कैरियर डेवलपमेंट प्रोफेसर रितु रमन कहते हैं, "ये लचीलेपन एक कंकाल की तरह हैं जिसका उपयोग लोग अब मांसपेशियों की सक्रियता को गति की स्वतंत्रता के कई डिग्री में बदलने के लिए कर सकते हैं।""हम रोबोटिकों को शक्तिशाली और सटीक मांसपेशी-संचालित रोबोट बनाने के लिए नियमों का एक नया सेट दे रहे हैं जो दिलचस्प चीजें करते हैं।"
रमन और उनके सहयोगियों ने नए फ्लेक्सचर डिज़ाइन के विवरण की रिपोर्ट दी हैकागज़आज जर्नल में छप रहा हैउन्नत इंटेलिजेंट सिस्टम.अध्ययन के एमआईटी सह-लेखकों में नाओमी लिंच '12, एसएम '23;स्नातक तारा शीहान;स्नातक छात्र निकोलस कास्त्रो, लौरा रोसाडो, और ब्रैंडन रियोस;और मैकेनिकल इंजीनियरिंग के प्रोफेसर मार्टिन कुल्पेपर।
मांसपेशियों में खिंचाव
जब अनुकूल परिस्थितियों में पेट्री डिश में अकेला छोड़ दिया जाता है, तो मांसपेशी ऊतक अपने आप सिकुड़ जाएगा लेकिन उन दिशाओं में जो पूरी तरह से अनुमानित या अधिक उपयोगी नहीं हैं।
"अगर मांसपेशी किसी चीज़ से जुड़ी नहीं है, तो यह बहुत अधिक हिलेगी, लेकिन भारी परिवर्तनशीलता के साथ, जहां यह तरल पदार्थ में इधर-उधर घूम रही है," रमन कहते हैं।
इंजीनियर आम तौर पर मांसपेशियों को एक यांत्रिक एक्ट्यूएटर की तरह काम करने के लिए दो छोटे, लचीले पदों के बीच मांसपेशी ऊतक का एक बैंड जोड़ते हैं।जैसे ही मांसपेशी बैंड स्वाभाविक रूप से सिकुड़ता है, यह पदों को मोड़ सकता है और उन्हें एक साथ खींच सकता है, जिससे कुछ गति उत्पन्न होती है जो आदर्श रूप से रोबोटिक कंकाल के हिस्से को शक्ति प्रदान करेगी।हालाँकि, इन डिज़ाइनों में, मांसपेशियों ने सीमित गति पैदा की है, मुख्यतः क्योंकि ऊतक इतने परिवर्तनशील हैं कि वे पदों से कैसे संपर्क करते हैं।
यह इस बात पर निर्भर करता है कि मांसपेशियों को पोस्टों पर कहां रखा गया है और मांसपेशियों की सतह का कितना हिस्सा पोस्ट को छू रहा है, मांसपेशियां पोस्टों को एक साथ खींचने में सफल हो सकती हैं, लेकिन अन्य समय में, अनियंत्रित तरीके से इधर-उधर लड़खड़ा सकती हैं।
रमन के समूह ने एक ऐसे कंकाल को डिजाइन करने पर विचार किया जो मांसपेशियों के संकुचन को केंद्रित और अधिकतम करता है, भले ही इसे कंकाल पर कहां और कैसे रखा गया हो ताकि पूर्वानुमानित, विश्वसनीय तरीके से सबसे अधिक गति उत्पन्न हो सके।
"सवाल यह है: हम एक ऐसा कंकाल कैसे डिज़ाइन करें जो मांसपेशियों द्वारा उत्पन्न बल का सबसे कुशलतापूर्वक उपयोग करता हो?"रमन कहते हैं.
शोधकर्ताओं ने सबसे पहले उन कई दिशाओं पर विचार किया जिनमें एक मांसपेशी स्वाभाविक रूप से घूम सकती है।उन्होंने तर्क दिया कि यदि एक मांसपेशी को दो पदों को एक विशिष्ट दिशा में एक साथ खींचना है, तो पदों को एक स्प्रिंग से जोड़ा जाना चाहिए जो खींचे जाने पर ही उन्हें उस दिशा में जाने की अनुमति देता है।
रमन कहते हैं, "हमें एक ऐसे उपकरण की ज़रूरत है जो एक दिशा में बहुत नरम और लचीला हो और अन्य सभी दिशाओं में बहुत कठोर हो ताकि जब कोई मांसपेशी सिकुड़ती है, तो वह सारा बल कुशलतापूर्वक एक दिशा में गति में परिवर्तित हो जाए।"
नरम लचीलापन
जैसा कि पता चला, रमन को प्रोफेसर मार्टिन कल्पेपर की प्रयोगशाला में ऐसे कई उपकरण मिले।एमआईटी में कल्पेपर का समूह मशीन तत्वों के डिजाइन और निर्माण में माहिर है, जैसे लघु एक्चुएटर्स, बियरिंग्स और अन्य तंत्र जिन्हें विभिन्न प्रकार के अनुप्रयोगों के लिए अल्ट्रासटीक मूवमेंट, माप और नियंत्रण को सक्षम करने के लिए मशीनों और प्रणालियों में बनाया जा सकता है।
समूह के सटीक मशीनी तत्वों में फ्लेक्सचर-स्प्रिंग जैसे उपकरण हैं, जो अक्सर समानांतर बीम से बने होते हैं, जो नैनोमीटर परिशुद्धता के साथ फ्लेक्स और खिंचाव कर सकते हैं।
रमन कहते हैं, "बीम कितनी पतली और एक-दूसरे से कितनी दूर हैं, इसके आधार पर आप यह बदल सकते हैं कि स्प्रिंग कितना कठोर प्रतीत होता है।"
उसने और कुल्पेपर ने मिलकर विशेष रूप से एक विन्यास और कठोरता के अनुरूप एक फ्लेक्सचर डिजाइन किया, जिससे मांसपेशियों के ऊतकों को संकुचन करने और स्प्रिंग को प्राकृतिक रूप से अधिकतम रूप से फैलाने में सक्षम बनाया जा सके।टीम ने मांसपेशियों की प्राकृतिक शक्तियों को लचीलेपन की कठोरता और गति की डिग्री के साथ जोड़ने के लिए की गई कई गणनाओं के आधार पर डिवाइस के विन्यास और आयामों को डिजाइन किया।
अंततः उन्होंने जो लचीलापन तैयार किया वह मांसपेशियों के ऊतकों की कठोरता का 1/100 है।यह उपकरण एक लघु, अकॉर्डियन जैसी संरचना जैसा दिखता है, जिसके कोनों को एक छोटे से पोस्ट द्वारा अंतर्निहित आधार पर पिन किया जाता है, जो एक पड़ोसी पोस्ट के पास बैठता है जो सीधे आधार पर फिट बैठता है।
इसके बाद रमन ने दोनों कोने की पोस्टों के चारों ओर मांसपेशियों का एक बैंड लपेट दिया (टीम ने बैंड को लाइव से ढाला)।मांसपेशी फाइबरकि वे माउस कोशिकाओं से विकसित हुए हैं), और मापा गया कि मांसपेशी बैंड के सिकुड़ने पर पोस्ट कितनी करीब खींची गईं।
टीम ने पाया कि लचीलेपन के विन्यास ने मांसपेशी बैंड को ज्यादातर दो पदों के बीच की दिशा में सिकुड़ने में सक्षम बनाया।इस केंद्रित संकुचन ने मांसपेशियों को पिछले मांसपेशी एक्ट्यूएटर डिजाइनों की तुलना में पोस्टों को एक-दूसरे के बहुत करीब खींचने की अनुमति दी - पांच गुना करीब।
रमन कहते हैं, "फ्लेक्सचर एक कंकाल है जिसे हमने एक दिशा में बहुत नरम और लचीला और अन्य सभी दिशाओं में बहुत कठोर बनाने के लिए डिज़ाइन किया है।""जब मांसपेशियाँ सिकुड़ती हैं, तो सारा बल उस दिशा में गति में परिवर्तित हो जाता है। यह एक बहुत बड़ा आवर्धन है।"
टीम ने पाया कि वे मांसपेशियों के प्रदर्शन और सहनशक्ति को सटीक रूप से मापने के लिए डिवाइस का उपयोग कर सकते हैं।जब उन्होंने मांसपेशियों के संकुचन की आवृत्ति को अलग-अलग किया (उदाहरण के लिए, बैंड को प्रति सेकंड एक बार बनाम चार बार संकुचन के लिए उत्तेजित करना), तो उन्होंने देखा कि उच्च आवृत्तियों पर मांसपेशियां "थक गईं" और उतना खिंचाव उत्पन्न नहीं हुआ।
रमन कहते हैं, "यह देखते हुए कि हमारी मांसपेशियां कितनी जल्दी थक जाती हैं और हम उन्हें उच्च-धीरज प्रतिक्रिया के लिए कैसे व्यायाम कर सकते हैं - यही हम इस मंच से उजागर कर सकते हैं।"
शोधकर्ता अब प्राकृतिक मांसपेशियों द्वारा संचालित सटीक, स्पष्ट और विश्वसनीय रोबोट बनाने के लिए लचीलेपन को अनुकूलित और संयोजित कर रहे हैं।
रमन कहते हैं, "भविष्य में हम जिस रोबोट का निर्माण करने की कोशिश कर रहे हैं उसका एक उदाहरण एक सर्जिकल रोबोट है जो शरीर के अंदर न्यूनतम आक्रामक प्रक्रियाएं कर सकता है।""तकनीकी रूप से, मांसपेशियां किसी भी आकार के रोबोट को शक्ति प्रदान कर सकती हैं, लेकिन हम छोटे रोबोट बनाने में विशेष रूप से उत्साहित हैं, क्योंकि यहीं पर जैविक एक्चुएटर्स ताकत, दक्षता और अनुकूलनशीलता के मामले में उत्कृष्टता प्राप्त करते हैं।"
अधिक जानकारी:नाओमी लिंच एट अल, लचीलेपन के साथ मांसपेशी एक्ट्यूएटर्स के प्रदर्शन को बढ़ाना और डिकोड करना,उन्नत इंटेलिजेंट सिस्टम(2024)।डीओआई: 10.1002/ऐसी.202300834
यह कहानी एमआईटी न्यूज़ के सौजन्य से पुनः प्रकाशित की गई है (web.mit.edu/newsoffice/), एक लोकप्रिय साइट जो एमआईटी अनुसंधान, नवाचार और शिक्षण के बारे में समाचार कवर करती है।
उद्धरण:इंजीनियरों ने नरम, मांसपेशियों से चलने वाले रोबोट के लिए लचीले 'कंकाल' डिजाइन किए (2024, 8 अप्रैल)8 अप्रैल 2024 को पुनः प्राप्तhttps://techxplore.com/news/2024-04-flexible-skeletons-soft-muscle-powered.html से
यह दस्तावेज कॉपीराइट के अधीन है।निजी अध्ययन या अनुसंधान के उद्देश्य से किसी भी निष्पक्ष व्यवहार के अलावा, नहींलिखित अनुमति के बिना भाग को पुन: प्रस्तुत किया जा सकता है।सामग्री केवल सूचना के प्रयोजनों के लिए प्रदान की गई है।