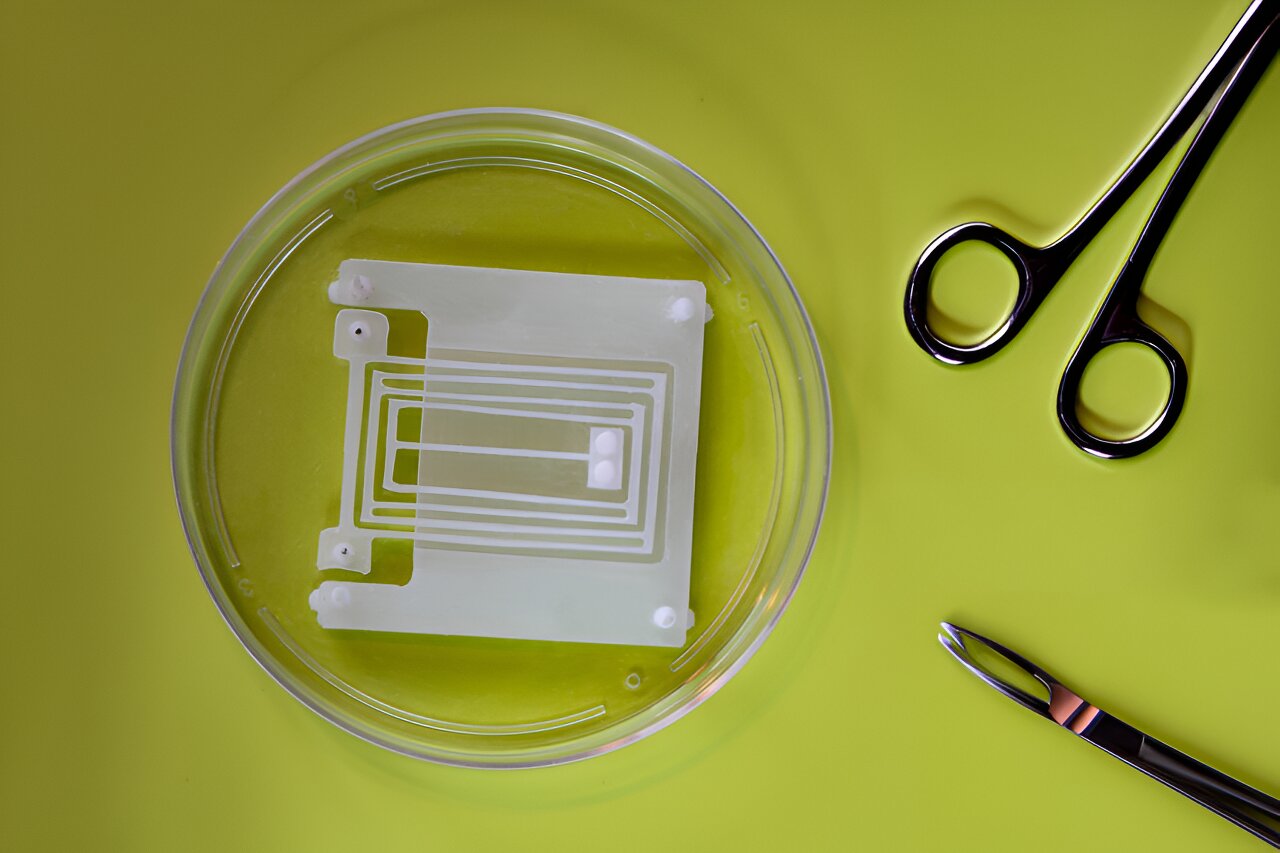
 that maximizes the work of natural muscles. When living muscle tissue is attached to posts at the corners of the device, the muscle’s contractions pull on the spring, forming an effective, natural actuator. The spring can serve as a “skeleton†for future muscle-powered robots. Credits: Felice Frankel")
私たちの筋肉は、エネルギーを動きに変える自然の完璧なアクチュエーター、装置です。筋線維は、そのサイズの割に、ほとんどの合成アクチュエーターよりも強力で正確です。損傷から回復したり、運動によってより強くなったりすることもできます。
これらの理由から、エンジニアは自然な筋肉でロボットに動力を供給する方法を模索しています。彼らは、筋肉ベースのアクチュエーターを使用して、歩き、泳ぎ、ポンプを動かし、握る人工骨格に動力を供給する、いくつかの「バイオハイブリッド」ロボットを実証しました。しかし、ロボットごとに構造は大きく異なり、特定のロボット設計の筋肉を最大限に活用するための一般的な青写真はありません。
今回、MIT のエンジニアは、ほぼすべての筋肉に縛られたボットの基本的なスケルトンのようなモジュールとして使用できるバネのようなデバイスを開発しました。新しいスプリング、または「屈曲部」は、付着した筋肉組織から最大限の仕事を引き出すように設計されています。適切な重量でフィットするレッグプレスのように、このデバイスは筋肉が自然に生み出すことができる動きの量を最大化します。
研究者らは、筋肉組織のリングをデバイスに装着すると、輪ゴム2 本の支柱の周りを伸ばすと、筋肉が繰り返し確実にバネを引っ張り、以前の他の設計の装置と比較して 5 倍もバネを伸ばしました。
研究チームは、フレクシャの設計を、他のフレクシャと組み合わせて任意の構成の人工骨格を構築できる新しい構成要素とみなしています。その後、エンジニアは骨格に筋肉組織を取り付けて、動きを強化することができます。
「これらの屈曲は、非常に予測可能な方法で筋肉の作動を複数の自由度の動作に変えるために使用できる骨格のようなものです」と、マサチューセッツ工科大学工学設計の英国人でアレックス・ダルベロフのキャリア開発教授であるリトゥ・ラマン氏は述べています。「私たちはロボット工学者に、興味深いことを行う強力かつ正確な筋力ロボットを作るための新しいルールを与えています。」
Raman と彼女の同僚は、新しいたわみ設計の詳細を次の論文で報告しています。紙今日の日記に掲載される高度なインテリジェントシステム。この研究の MIT 共著者には、Naomi Lynch '12、SM '23 が含まれます。学部生のタラ・シーハン。大学院生のニコラス・カストロ、ローラ・ロサド、ブランドン・リオス。そして機械工学のマーティン・カルペッパー教授。
筋肉の引っ張り
好条件のペトリ皿に放っておくと、筋肉組織は自然に収縮しますが、その方向は完全には予測できず、あまり役に立ちません。
「筋肉が何も付着していなければ、筋肉は大きく動きますが、その変動は大きく、液体の中でただ飛び回っているだけです」とラマン氏は言う。
エンジニアは通常、筋肉を機械的アクチュエーターのように機能させるために、2 つの小さな柔軟なポストの間に筋肉組織のバンドを取り付けます。筋肉バンドが自然に収縮すると、ポストを曲げて一緒に引っ張り、ロボットの骨格の一部に理想的に動力を供給する動きを生み出すことができます。しかし、これらの設計では、組織がポストにどのように接触するかが非常に多様であるため、筋肉の動きが制限されています。
筋肉がポスト上のどこに配置されているか、また筋肉の表面がどの程度ポストに接触しているかによって、筋肉はポストをうまく引き寄せることができますが、制御不能な方法でぐらつくこともあります。
ラマン氏のグループは、予測可能で信頼性の高い方法で最大の動きを生み出すために、筋肉が骨格上のどこにどのように配置されているかに関係なく、筋肉の収縮に焦点を合わせて最大化する骨格を設計することを検討しました。
「問題は、筋肉が生み出す力を最も効率的に利用する骨格をどのように設計するかということです。」ラマン氏は言う。
研究者らはまず、筋肉が自然に動くことができる複数の方向を検討しました。彼らは、筋肉が 2 つの柱を特定の方向に沿って引き寄せる場合、柱は引っ張られたときにその方向にのみ移動できるようにするバネに接続する必要があると推論しました。
「筋肉が収縮するときにすべての力が一方向の動きに効率的に変換されるように、一方向には非常に柔らかく柔軟性があり、他のすべての方向には非常に硬いデバイスが必要です」とラマン氏は言います。
ソフトフレックス
結局のところ、ラマンはマーティン・カルペッパー教授の研究室でそのような装置を多数発見しました。MIT のカルペッパー氏のグループは、機械やシステムに組み込んでさまざまな用途の超精密な動作、測定、制御を可能にする小型アクチュエータ、ベアリング、その他の機構などの機械要素の設計と製造を専門としています。
このグループの精密機械加工要素の中には、ナノメートルの精度で曲げたり伸ばしたりできる、平行ビームから作られることが多いフレクシャ、つまりバネ状のデバイスがあります。
「梁の細さと距離に応じて、バネの硬さの見え方を変えることができます」とラマン氏は言います。
彼女とカルペッパーはチームを組んで、筋肉組織が自然に収縮し、スプリングを最大限に伸ばすことができるように、構成と剛性に合わせて特別に調整されたフレクシャを設計しました。研究チームは、筋肉の自然な力と屈曲部の硬さと動きの程度を関連付けるために実行した多数の計算に基づいて、デバイスの構成と寸法を設計しました。
彼らが最終的に設計したたわみは、筋肉組織自体の硬さの 1/100 です。この装置は小型のアコーディオン状の構造に似ており、その角は小さな柱によって下にあるベースに固定されており、その柱はベースに直接フィットする隣接するポストの近くにあります。
次に、ラマン氏は 2 つのコーナーポストの周りに筋肉のバンドを巻き付けました (チームはライブからバンドを成形しました)筋繊維それらはマウスの細胞から成長したものであると考えられ)、筋肉バンドが収縮するときに支柱がどれだけ近くに引き寄せられるかを測定しました。
研究チームは、フレクシャの構成により、筋肉バンドが主に 2 つのポスト間の方向に沿って収縮できることを発見しました。この集中的な収縮により、筋肉はポストをはるかに近づけることができ、以前の筋肉アクチュエータの設計と比較して 5 倍近くに近づけることができました。
「フレクシャは、一方向には非常に柔らかく柔軟性があり、他のすべての方向には非常に硬いように設計された骨格です」とラマン氏は言います。「筋肉が収縮すると、すべての力がその方向の動きに変換されます。それは非常に大きな倍率です。」
研究チームは、このデバイスを使用して筋肉のパフォーマンスと持久力を正確に測定できることを発見しました。筋肉の収縮の頻度を変えると(たとえば、1秒間に1回と4回の収縮を刺激してバンドを刺激するなど)、周波数が高くなると筋肉が「疲労」し、それほど引っ張られなくなることが観察されました。
「私たちの筋肉がどれだけ早く疲労するか、そしてどのように筋肉を鍛えれば高い耐久力を発揮できるかを調べます。これがこのプラットフォームで明らかにできることです」とラマン氏は言います。
研究者らは現在、自然な筋肉を動力源とする、正確で多関節で信頼性の高いロボットを構築するために、たわみを適応させて組み合わせている。
「私たちが将来構築しようとしているロボットの一例は、体内で低侵襲処置を実行できる外科用ロボットです」とラマン氏は言う。「技術的には、筋肉はどんなサイズのロボットにも動力を与えることができますが、私たちは特に小型ロボットの製作に興奮しています。これは強度、効率、適応性の点で生物学的アクチュエーターが優れているところだからです。」
詳細情報:ナオミ・リンチ他、屈曲による筋肉アクチュエータのパフォーマンスの強化と解読、高度なインテリジェントシステム(2024年)。DOI: 10.1002/aisy.202300834
この記事は MIT ニュースのご厚意により再掲載されています (web.mit.edu/ニュースオフィス/) は、MIT の研究、イノベーション、教育に関するニュースを扱う人気のサイトです。
引用:エンジニアが、筋肉を動力とする柔らかいロボット用の柔軟な「スケルトン」を設計 (2024 年 4 月 8 日)2024 年 4 月 8 日に取得https://techxplore.com/news/2024-04-flexible-skeletons-soft-muscle-powered.html より
この文書は著作権の対象です。個人的な研究や研究を目的とした公正な取引を除き、書面による許可なく一部を複製することができます。コンテンツは情報提供のみを目的として提供されています。