
與機器人相比,人體靈活,能夠進行精細動作,能夠有效率地將能量轉化為運動。日本研究人員從人類步態中汲取靈感,透過結合肌肉組織和人造材料,製造出了一種兩足生物混合機器人。已發表1 月 26 日發表於雜誌上事,這種方法允許機器人行走和旋轉。
「生物混合機器人的研究融合了生物學和力學,作為機器人學的新領域,最近引起了人們的注意。生物學功能日本東京大學的通訊作者 Shoji Takeuchi 說。機器人並透過柔軟的觸感實現高效、安靜的運動。
研究團隊的兩足機器人是一種創新的雙足設計,建立在利用肌肉的生物混合機器人的基礎上。肌肉組織驅動生物混合機器人向前爬行、游泳和轉彎,但不能急轉彎。然而,能夠轉動並做出急轉彎是機器人躲避障礙物的必備功能。
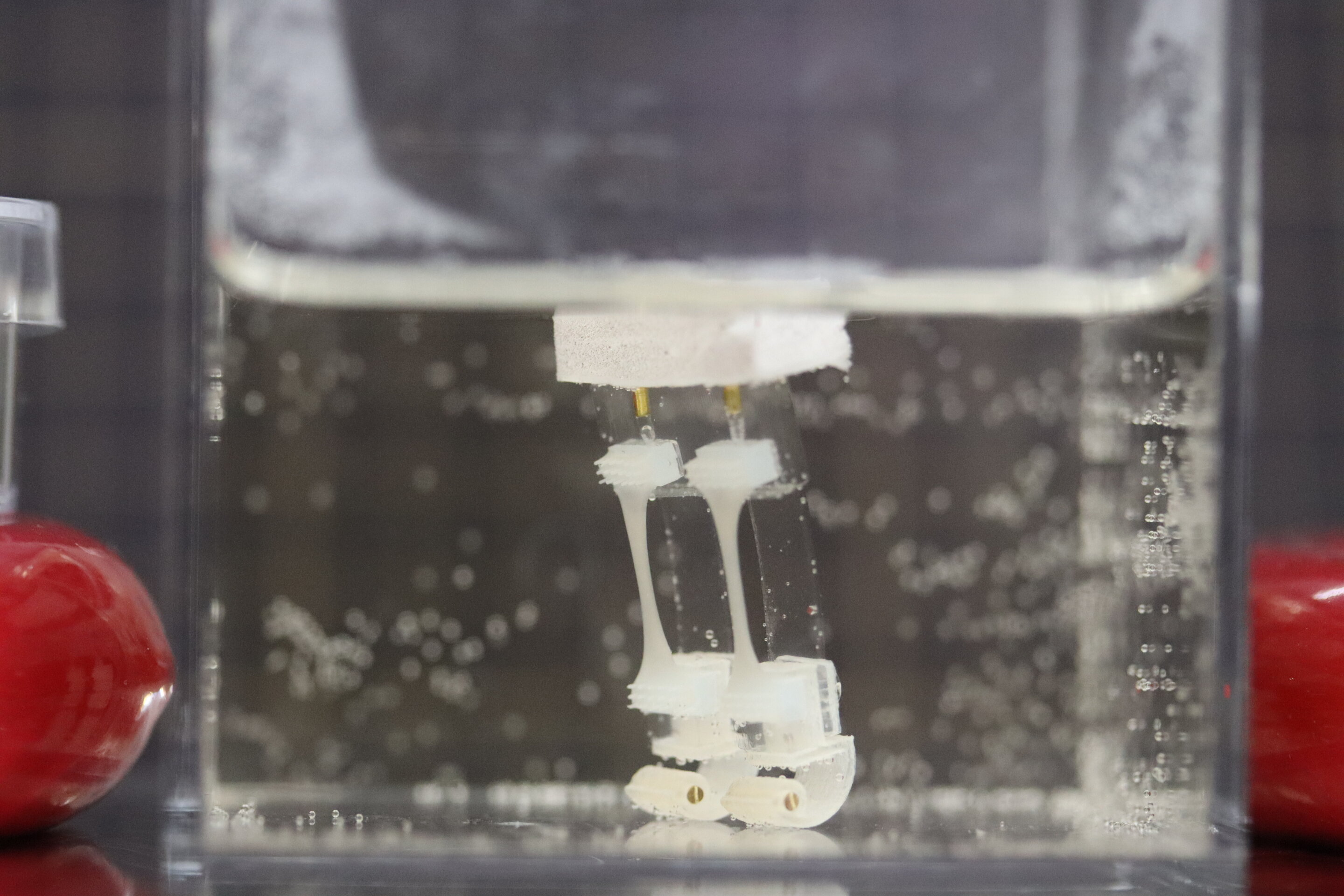
為了建造一個動作更靈活、動作更精細的機器人,研究人員設計了一個模仿人類步態並在水中操作的生物混合機器人。機器人有一個泡沫浮標頂部和加重的腿,以幫助它在水下直立。機器人的骨架主要由矽橡膠可以彎曲和彎曲以適應肌肉運動。然後,研究人員將實驗室培養的骨骼肌組織條貼在矽橡膠和每條腿上。
當研究人員用電擊打肌肉組織時,肌肉收縮,將腿抬起。當電流消散時,腿的腳跟向前著地。透過每五秒在左右腿之間交替進行電刺激,生物混合機器人成功地以 5.4 毫米/分鐘(0.002 英里/小時)的速度「行走」。
為了轉彎,研究人員每五秒重複敲擊右腿,同時左腿充當錨點。機器人在 62 秒內完成了 90 度左轉。研究結果表明,肌肉驅動的雙足機器人可以行走、停止和進行微調的轉彎動作。
「目前,我們正在手動移動一對電極以施加電場竹內說:“未來,透過將電極整合到機器人中,我們希望更有效地提高速度。”
該團隊還計劃為雙足機器人提供關節和更厚的肌肉組織,以實現更複雜和強大的運動。但竹內說,在用更多生物組件升級機器人之前,團隊必須整合營養供應系統,以維持活體組織和設備結構,使機器人能夠在空氣中運作。
「當我們在影片中看到機器人成功行走時,在我們的例行實驗室會議上爆發出歡呼聲,」竹內說。「雖然他們可能看起來像小步驟事實上,它們是生物混合機器人的巨大飛躍。
更多資訊:由骨骼肌組織提供動力的生物混合雙足機器人,事(2024)。DOI:10.1016/j.matt.2023.12.035。www.cell.com/matter/fulltext/S2590-2385(23)00648-3引文
:科學家設計出一種由肌肉組織驅動的兩足機器人(2024年1月26日)檢索日期:2024 年 1 月 26 日來自 https://techxplore.com/news/2024-01-scientists-legged-robot-powered-muscle.html
本文檔受版權保護。除了出於私人學習或研究目的的任何公平交易外,不得未經書面許可,不得複製部分內容。所提供的內容僅供參考。