
로봇에 비해 인간의 신체는 유연하고 미세한 움직임이 가능하며 에너지를 효율적으로 움직임으로 변환할 수 있습니다.일본 연구자들은 인간의 보행에서 영감을 얻어 근육 조직과 인공 재료를 결합하여 두 다리로 움직이는 바이오 하이브리드 로봇을 제작했습니다.게시됨1월 26일자 일기장에문제, 이 방법을 사용하면 로봇이 걷고 회전할 수 있습니다.
생물학과 역학이 융합된 바이오하이브리드 로봇에 대한 연구가 최근 로봇공학의 새로운 분야로 주목받고 있다.생물학적 기능교신 저자인 일본 도쿄 대학의 다케우치 쇼지(Shoji Takeuchi)는 말합니다. “근육을 작동 장치로 사용하면 소형 로봇을 만들 수 있습니다.기계 인간부드러운 터치로 효율적이고 조용한 움직임을 실현합니다."
연구팀이 개발한 혁신적인 이족보행 로봇은 근육을 활용하는 바이오하이브리드 로봇의 유산을 바탕으로 제작됐다.근육 조직은 바이오하이브리드 로봇을 구동하여 앞으로 똑바로 기어가고 헤엄치며 방향을 바꾸지만 날카로운 방향은 아닙니다.그럼에도 불구하고 피벗하고 만들 수 있는 것은급회전로봇이 장애물을 피하는 데 필수적인 기능입니다.
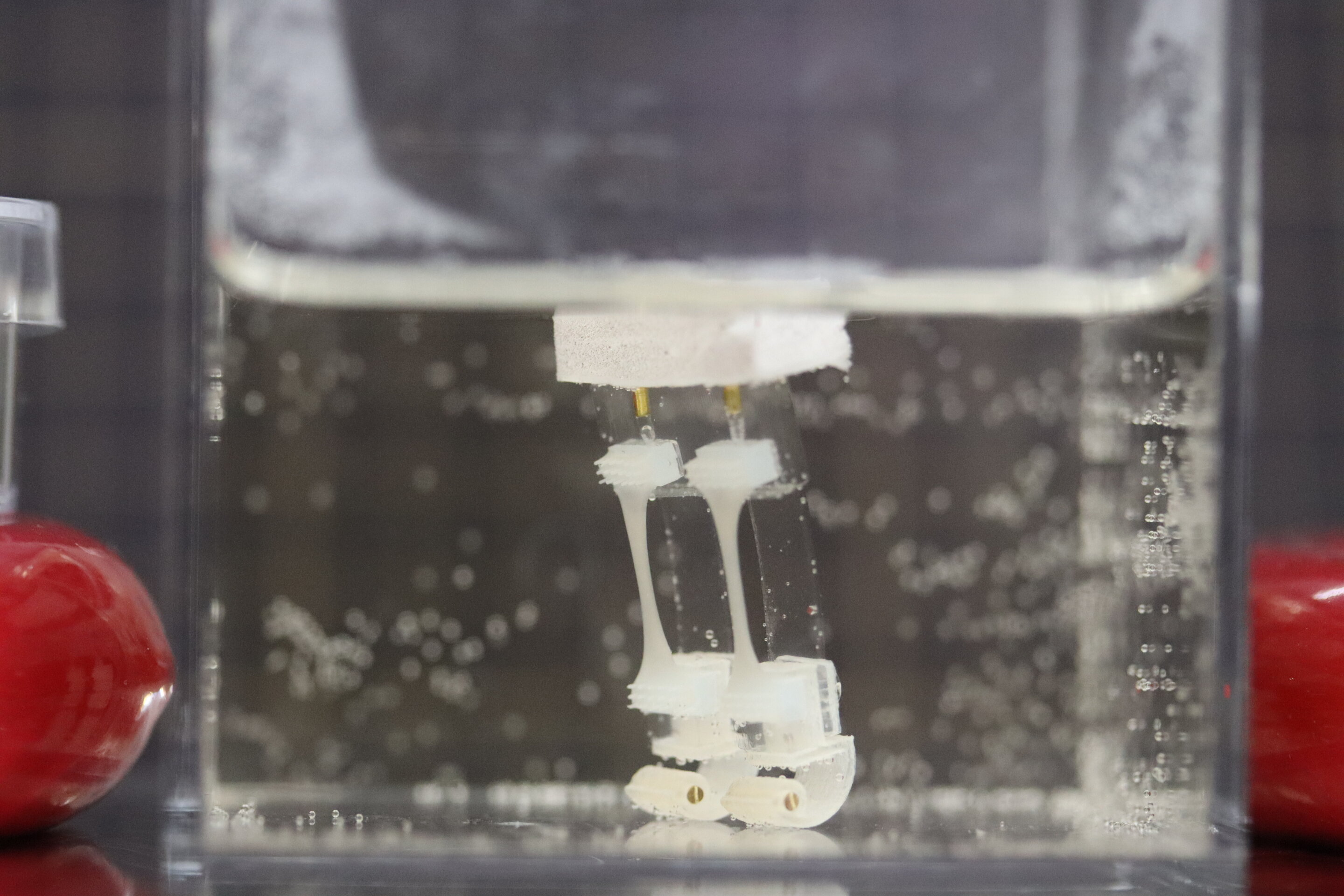
미세하고 섬세한 움직임을 갖춘 보다 민첩한 로봇을 만들기 위해 연구진은 인간의 보행을 모방하고 물 속에서 작동하는 바이오하이브리드 로봇을 설계했습니다.로봇에는 폼 부표 상단과 무게가 있는 다리가 있어 수중에서 똑바로 설 수 있습니다.로봇의 골격은 주로 다음과 같은 재료로 만들어집니다.실리콘고무근육의 움직임에 따라 구부리고 구부릴 수 있는 것입니다.그런 다음 연구원들은 실험실에서 배양한 골격근 조직 조각을 실리콘 고무와 각 다리에 부착했습니다.
연구진이 근육 조직을 전기로 공격하자 근육이 수축하면서 다리가 위로 올라갔습니다.전기가 소멸되자 다리의 뒤꿈치가 앞으로 착지했습니다.5초마다 왼쪽 다리와 오른쪽 다리 사이에 전기 자극을 번갈아 가며 바이오하이브리드 로봇은 5.4mm/분(0.002mph)의 속도로 성공적으로 "걷는" 데 성공했습니다.
회전을 위해 연구자들은 왼쪽 다리가 닻 역할을 하는 동안 오른쪽 다리를 5초마다 반복적으로 재빠르게 공격했습니다.로봇은 62초 만에 90도 좌회전을 성공했다.연구 결과에 따르면 근육 구동 이족 보행 로봇은 걷고, 멈추고, 미세 조정된 회전 동작을 할 수 있는 것으로 나타났습니다.
"현재 우리는 한 쌍의 전극을 수동으로 이동하여전기장다케우치 씨는 “앞으로 전극을 로봇에 통합함으로써 속도를 더욱 효율적으로 높일 수 있을 것으로 기대한다”고 말했다.
연구팀은 또한 이족 보행 로봇에 관절과 두꺼운 근육 조직을 부여해 보다 정교하고 강력한 움직임을 가능하게 할 계획이다.그러나 Takeuchi는 로봇을 더 많은 생물학적 구성 요소로 업그레이드하기 전에 로봇이 공중에서 작동할 수 있도록 하는 생체 조직과 장치 구조를 유지하기 위한 영양 공급 시스템을 통합해야 한다고 말했습니다.
Takeuchi는 "정규 연구실 회의에서 로봇이 비디오 위를 성공적으로 걷는 것을 보고 환호가 터졌습니다."라고 말했습니다."그들이 그렇게 보일 수도 있지만작은 발걸음, 사실 그들은 바이오하이브리드 로봇의 거대한 도약입니다."
추가 정보:골격근 조직으로 구동되는 바이오하이브리드 이족보행 로봇,문제(2024).DOI: 10.1016/j.matt.2023.12.035.www.cell.com/matter/fulltext/S2590-2385(23)00648-3소환
:과학자들이 근육 조직으로 구동되는 2족 로봇을 설계함(2024년 1월 26일)2024년 1월 26일에 확인함https://techxplore.com/news/2024-01-scientists-legged-robot-powered-muscle.html에서
이 문서는 저작권의 보호를 받습니다.사적인 학습이나 조사를 목적으로 하는 공정한 거래를 제외하고는 어떠한 행위도 허용되지 않습니다.서면 허가 없이 일부를 복제할 수 있습니다.콘텐츠는 정보 제공 목적으로만 제공됩니다.