
人間の身体はロボットに比べて柔軟で細かい動きが可能であり、エネルギーを効率よく運動に変換することができます。人間の歩き方からインスピレーションを得て、日本の研究者らは筋肉組織と人工材料を組み合わせて二足歩行のバイオハイブリッドロボットを製作した。発行済み1月26日の日記に案件, この方法により、ロボットは歩行したり旋回したりすることができます。
「生物学と力学を融合させたバイオハイブリッドロボットの研究は、ロボット工学の新たな分野として近年注目を集めています。生体機能」と責任著者の東京大学の竹内章二氏は言う。「筋肉をアクチュエーターとして使うことで、コンパクトな体を構築することができる」ロボットソフトなタッチで効率的で静かな動きを実現します。」
研究チームの二足歩行ロボットは革新的な二足歩行設計で、筋肉を利用するバイオハイブリッド ロボットの伝統を基礎にしています。筋肉組織は、バイオハイブリッド ロボットを這い、まっすぐ前に泳ぎ、方向転換するように動かしてきましたが、鋭い動きはできませんでした。それでも、ピボットして実現できることは、急な曲がり角ロボットが障害物を回避するために不可欠な機能です。
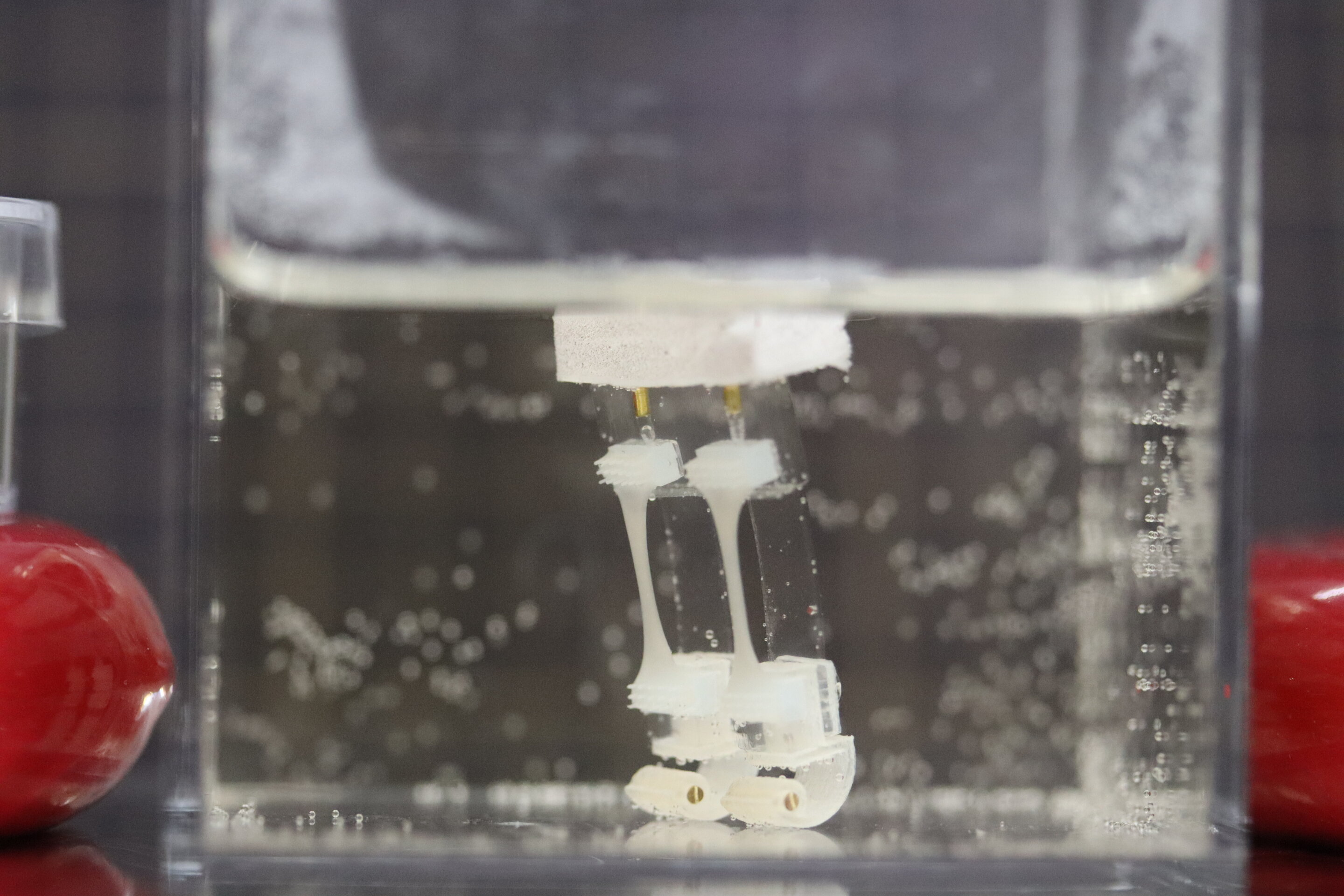
細かく繊細な動きをする機敏なロボットを構築するために、研究者らは人間の歩行を模倣し、水中で動作するバイオハイブリッドロボットを設計した。このロボットには発泡ブイの上部と重りのある脚があり、水中で真っすぐに立つことができます。ロボットの骨格は主にシリコーンゴム筋肉の動きに合わせて曲げたり曲げたりすることができます。次に研究者らは、実験室で作製した骨格筋組織の細片をシリコーンゴムと各脚に取り付けました。
研究者らが電気で筋肉組織をザッピングすると、筋肉が収縮し、脚が持ち上げられました。電気が消えると、足のかかとが前方に着地しました。5秒ごとに左右の脚に交互に電気刺激を与えることで、バイオハイブリッドロボットは5.4mm/min(0.002mph)の速度で「歩く」ことに成功した。
研究者らは向きを変えるために、左脚をアンカーの役割を果たしながら、右脚を5秒ごとに繰り返しザッピングした。ロボットは 62 秒で左に 90 度回転しました。この研究結果は、筋肉駆動の二足歩行ロボットが歩いたり、止まったり、微調整された回転動作を行うことができることを示しました。
「現在、一対の電極を手動で動かして、電界竹内氏は「各脚に個別に電極を設置するのには時間がかかる。将来的には電極をロボットに組み込むことで、より効率的に速度を上げることができると期待している」と語った。
研究チームはまた、より洗練された強力な動きを可能にするために、二足歩行ロボットに関節とより厚い筋肉組織を与えることも計画している。しかし竹内氏は、ロボットをより多くの生物学的コンポーネントでアップグレードする前に、チームは生体組織を維持するための栄養供給システムと、ロボットが空中で動作できるようにするデバイス構造を統合する必要があると述べた。
「研究室の定例ミーティング中、ロボットがビデオ上でうまく歩くのを見たとき、歓声が上がりました」と竹内氏は言います。「そう見えるかも知れませんが、小さな一歩実際、それらはバイオハイブリッド ロボットにとって大きな飛躍です。」
詳細情報:骨格筋組織を動力源とするバイオハイブリッド二足歩行ロボット、案件(2024年)。DOI: 10.1016/j.matt.2023.12.035。www.cell.com/matter/fulltext/S2590-2385(23)00648-3引用
:科学者らが筋肉組織を動力源とする二足歩行ロボットを設計 (2024年1月26日)2024 年 1 月 26 日に取得https://techxplore.com/news/2024-01-scientists-legged-robot-powered-muscle.html より
この文書は著作権の対象です。個人的な研究や研究を目的とした公正な取引を除き、書面による許可なく一部を複製することができます。コンテンツは情報提供のみを目的として提供されています。