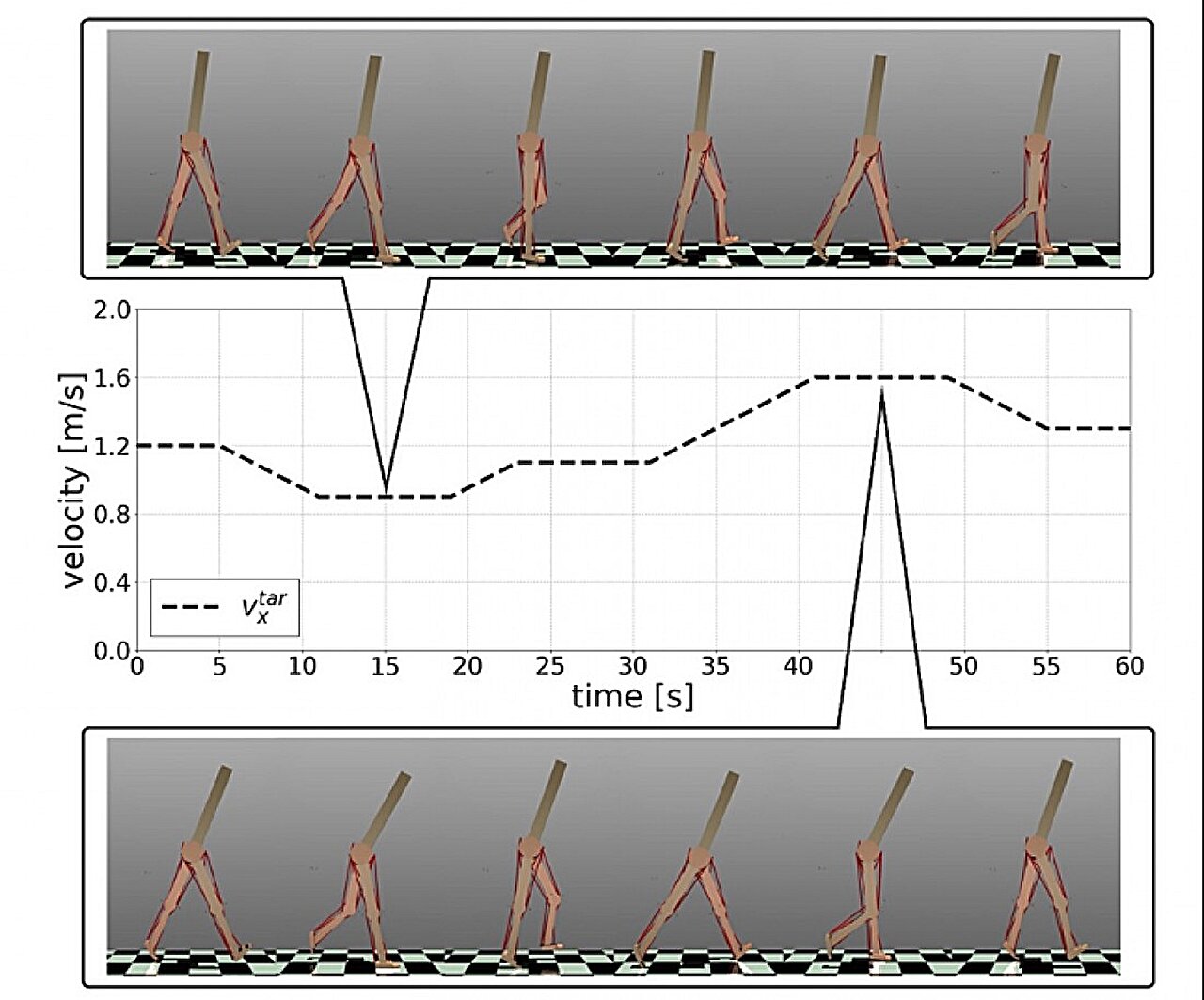
 using a musculoskeletal model that mimics a human. The existing reflex control framework could not accurately change the walking speed. Credit: Tohoku University")
我們通常在走路時不會考慮它,但步行是一項複雜的任務。在我們的神經系統的控制下,我們的骨骼、關節、肌肉、肌腱、韌帶和其他結締組織(即肌肉骨骼系統)必須協調運動,並以高效的方式以不同的速度回應意外的變化或乾擾。在機器人技術中複製這一點絕非易事。
現在,東北大學工學研究生院的研究小組複製了類人變量速度使用肌肉骨骼模型行走-由反映人類的反射控制方法引導神經系統。生物力學和機器人技術的這一突破為理解樹立了新的基準人體運動並為創新機器人技術鋪路。
他們的研究細節發表在期刊上公共科學圖書館計算生物學。
「我們的研究解決了以不同速度複製有效步行的複雜挑戰——這是人類步行機制的基石,」與 Shunsuke Koseki 和 Mitsuhiro Hayashibe 教授共同撰寫該研究的副教授 Dai Owaki 指出。“這些見解對於突破理解人類運動、適應和效率的界限至關重要。”
這項成就歸功於創新的演算法。該演算法超越了傳統的最小二乘法,並幫助設計了一種最佳化的神經電路模型能源效率不同的步行速度。
對這些神經迴路,特別是那些控制腿部擺動階段肌肉的神經迴路的深入分析,揭示了節能行走策略的關鍵要素。這些啟示增強了我們對支撐人類步態及其有效性的複雜神經網路機制的理解。
Owaki 強調,研究中發現的知識將有助於為未來的技術進步奠定基礎。
「在肌肉骨骼模型中成功模擬變速行走,結合複雜的神經電路,標誌著神經科學、生物力學和機器人技術融合的關鍵進步。它將徹底改變高性能雙足機器人、先進義肢的設計和開發,以及最先進的動力外骨骼。
這些發展可以改善殘疾人的移動解決方案,並推動日常生活中使用的機器人技術。
展望未來,Owaki 和他的團隊希望進一步完善反射控制框架,以重現更廣泛的人類步行速度和動作。他們還計劃應用研究中的見解和演算法來創造更具適應性和節能的義肢、動力套裝和雙足機器人。這包括將已識別的神經迴路整合到這些應用程式中,以增強其功能和運動的自然性。
更多資訊:Shunsuke Koseki 等人,在基於反射的肌肉骨骼系統中確定各種速度下節能步行控制的基本因素,PLOS 計算生物學(2024)。DOI:10.1371/journal.pcbi.1011771
引文:顯示人類如何以不同速度有效行走的生物力學模型可能為新機器人技術鋪平道路(2024 年,1 月 22 日)檢索日期:2024 年 1 月 22 日來自 https://techxplore.com/news/2024-01-biomechanics- humans-efficiently-varied-pave.html
本文檔受版權保護。除了出於私人學習或研究目的的任何公平交易外,不得未經書面許可,不得複製部分內容。所提供的內容僅供參考。