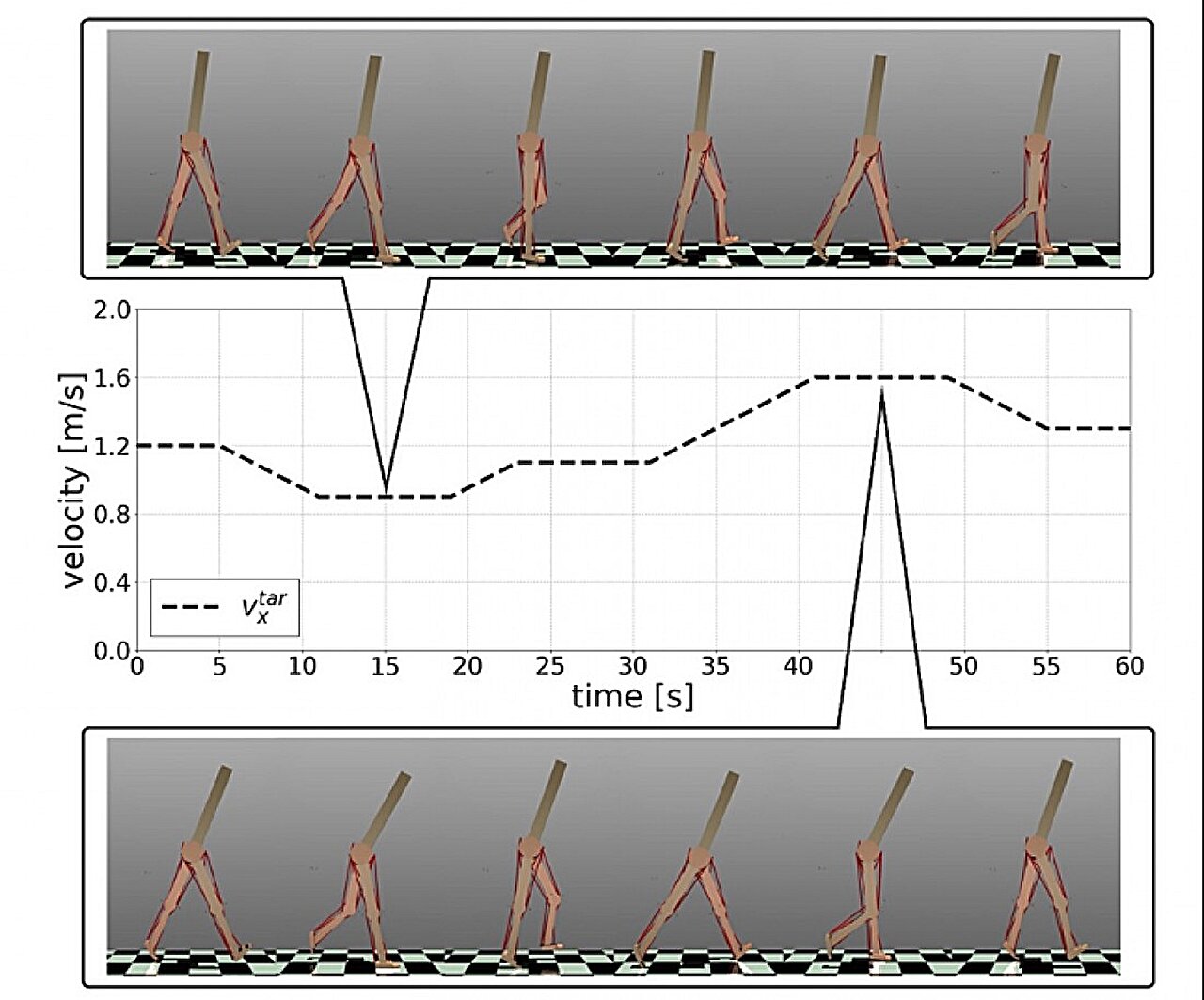
 using a musculoskeletal model that mimics a human. The existing reflex control framework could not accurately change the walking speed. Credit: Tohoku University")
普段、歩きながら考えることはありませんが、歩くというのは複雑な作業です。私たちの神経系によって制御される骨、関節、筋肉、腱、靱帯およびその他の結合組織 (筋骨格系) は、協調して動き、さまざまな速度で予期せぬ変化や障害に非常に効率的に対応する必要があります。これをロボット技術で再現するのは簡単なことではない。
今回、東北大学大学院工学研究科の研究グループが人間に似た変数を再現したスピード筋骨格モデルを使用した歩行 - 人間を反映した反射制御方法によって操作されるモデル神経系。生体力学とロボット工学におけるこの画期的な進歩は、理解における新たなベンチマークを設定します人間の動きそして革新的なロボット技術への道を切り開きます。
彼らの研究の詳細は雑誌に掲載されましたPLoS 計算生物学。
「私たちの研究は、人間の歩行メカニズムの基礎である、さまざまな速度での効率的な歩行を再現するという複雑な課題に取り組みました」と、古関俊介教授、林部光博教授とともに研究の共著者である大脇大准教授は指摘する。「これらの洞察は、人間の移動、適応、効率を理解する限界を押し上げる上で極めて重要です。」
この成果は革新的なアルゴリズムのおかげでした。このアルゴリズムは従来の最小二乗法を超えて進化し、最適化された神経回路モデルの考案に役立ちました。エネルギー効率さまざまな歩行速度で。
これらの神経回路、特に脚の遊脚期の筋肉を制御する神経回路の集中的な分析により、省エネ歩行戦略の重要な要素が明らかになりました。これらの発見は、人間の歩行とその有効性を支える複雑な神経ネットワーク機構の理解を強化します。
大脇氏は、今回の研究で明らかになった知識は将来の技術進歩の基礎を築くのに役立つと強調する。
「筋骨格モデルにおける可変速歩行のエミュレーションの成功と、洗練された神経回路の組み合わせは、神経科学、生体力学、ロボット工学の融合における極めて重要な進歩を示すものである。これは、高性能二足歩行ロボットや高度な義足の設計と開発に革命をもたらすだろう」、そして最先端の動力を備えた外骨格。」
このような開発により、障害のある個人の移動ソリューションが改善され、日常生活で使用されるロボット技術が進歩する可能性があります。
今後を見据えて、大脇氏と彼のチームは、人間のより広範囲の歩行速度と動きを再現するために、反射制御フレームワークをさらに改良したいと考えています。彼らはまた、研究から得られた洞察とアルゴリズムを適用して、より適応性が高くエネルギー効率の高い義肢、パワードスーツ、二足歩行ロボットを作成することも計画しています。これには、特定された神経回路をこれらのアプリケーションに統合して、その機能と動きの自然さを強化することが含まれます。
詳細情報:小関俊介ら、反射に基づく筋骨格系における幅広い速度にわたるエネルギー効率の高い歩行制御に不可欠な要素を特定する、PLOS 計算生物学(2024年)。DOI: 10.1371/journal.pcbi.1011771
引用:人間がさまざまな速度で効率的に歩く方法を示す生体力学モデルが、新しいロボット工学への道を開く可能性があることを示す (2024 年 1 月 22 日)2024 年 1 月 22 日に取得https://techxplore.com/news/2024-01-biomechanics-humans-efficiently-varied-pave.html より
この文書は著作権の対象です。個人的な研究や研究を目的とした公正な取引を除き、書面による許可なく一部を複製することができます。コンテンツは情報提供のみを目的として提供されています。