
. DOI: 10.1126/scirobotics.adi5908")
意大利 Fondazione Istituto Istituto Italiano di Tecnologia 的三名软机器人研究人员与法国蒙彼利埃大学的一位同事合作,开发了一种独特的机器人,可以通过 3D 打印自己的身体来延长身体。在他们的论文中发表在日记中科学机器人,该小组描述了他们如何创建机器人及其可能的用途。
随着科学技术的不断成熟,科学家们找到了将创新与新型技术相结合的新方法。在这项新的努力中,研究团队将机器人技术与 3D 打印相结合,创造出了一种可以随意增长的新型机器人。
该机器人的形状像蛇,有一个可以旋转的头部。当头部旋转时,它会产生更多体重它的后面使用3D打印,导致机器人伸长。机器人还可以通过编程以所需的方式生长,例如朝向光或逆重力。这使得机器人能够像藤蔓一样生长。该团队将他们的机器人命名为 FiloBot。
FiloBot 体内有一根管子,为头部供料,其中含有 3D 打印机墨水(一种塑料)。然后打印头以旋转方式进行打印,将身体材料卷绕在其后面。在机器人后部的另一端,有一个底座,用于容纳墨水池、泵和电源。
打印头内部以及打印机内都有电子设备,可对来自打印头外部传感器的信号做出响应。来自传感器的输入用于控制打印机的输出——它能够加快或减慢其旋转速度和供应的墨水量。这允许控制生长方向。
研究人员提出了它们的可能用途机器人包括监控甚至与非结构化(自然)环境交互或构建自主结构。它还可以用于监测景观,以估计雪崩或山体滑坡的可能性,并测试难以到达地区的污染水平。
-
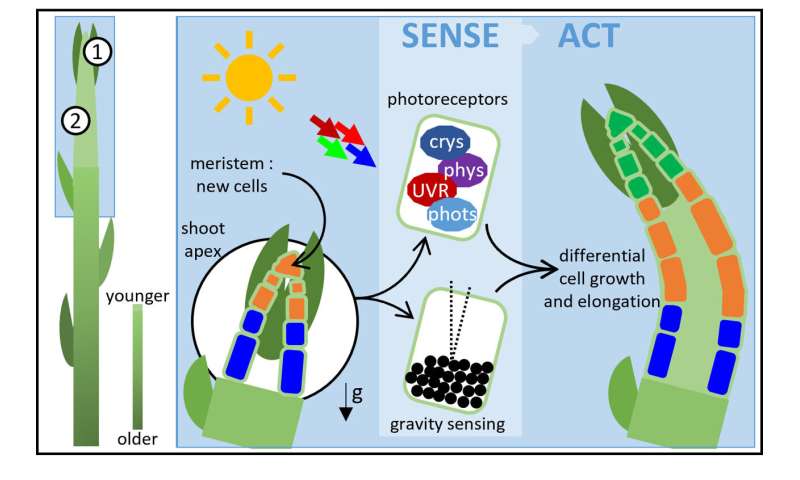
生长区、其功能和生长反应的简化表示。茎尖包含构成分生组织部分(点 1)和细胞伸长区域(点 2)的细胞层。光感受器和重力感应细胞分布在茎尖内。因此,对外部信号的感知集中在顶端部分,也在那里实现驱动。外部刺激的处理决定了细胞的生长、伸长以及芽的最终方向。在该示例中,照片感知定义了朝向光的拍摄运动与针对重力的重力感知相结合。信用:科学机器人(2024)。DOI:10.1126/scirobotics.adi5908 -
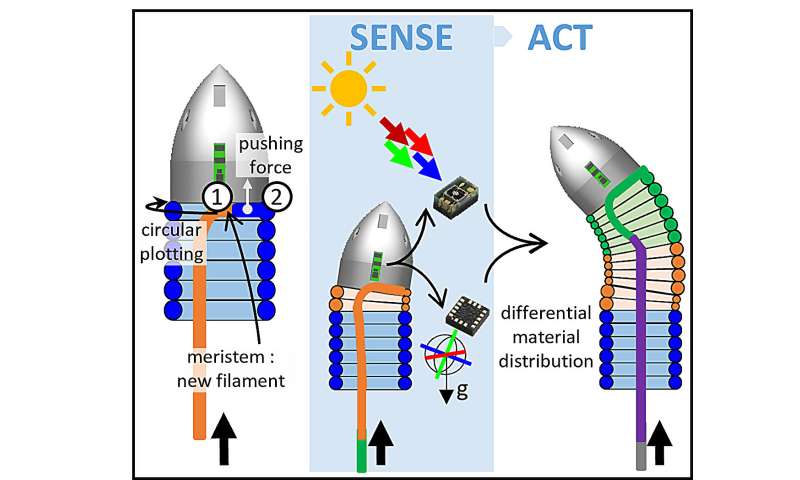
机器人生长区域、功能和生长反应的示意图。与芽尖类似,机器人包括传感元件和位于其头部(点 1 和 2)的材料沉积区域。在类似分生组织的区域中,添加材料并产生推动尖端前进所需的力。绘图的控制定义了沿着茎轴的较低或较高的材料层,类似于差异细胞分裂和伸长。与生物模型类似,机器人处理感官输入并定义朝向光和对抗重力的差异材料沉积。在自然模型和人工模型中,身体已经生长的部分不再根据环境移动或重新定向。信用:科学机器人(2024)。DOI:10.1126/scirobotics.adi5908
更多信息:Emanuela Del Dottore 等人,一种生长中的软机器人,具有攀爬植物的灵感,可在非结构化环境中进行导航的自适应行为,科学机器人(2024)。DOI:10.1126/scirobotics.adi5908
© 2024 Science X 网络
引文:新型蛇形机器人3D打印自己的身体以变得更长(2024年1月19日)检索日期:2024 年 1 月 19 日来自 https://techxplore.com/news/2024-01-snake-robot-3d-body-longer.html
本文档受版权保护。除了出于私人学习或研究目的的任何公平交易外,不得未经书面许可,不得复制部分内容。所提供的内容仅供参考。