")
機器人系統已被引入許多現實環境中,包括一些工業和製造設施。在這些設施中,機器人可以協助人類裝配線和倉庫工人,以高精度地組裝產品的某些零件,然後將它們交給負責執行其他操作的人類代理。
近年來,機器人專家和電腦科學家一直在嘗試開發越來越先進的系統,以增強工業環境中機器人和人類之間的互動。一些提出的解決方案依賴所謂的「數位孿生」系統,虛擬模型旨在準確地再現物理對象,例如正在製造的特定產品或組件。
中國南京航空航天大學的研究人員最近推出了一種新的數位孿生系統,可以改善製造環境中人類和機器人代理之間的協作。該系統在論文中介紹過發表在機器人與電腦整合製造,可以創建現實世界環境的虛擬地圖來規劃和執行合適的機器人它們與人類合作完成特定任務時的行為。
「在工業環境中,目前建立人體數位孿生模型的方法依賴動作捕捉設備,需要人員佩戴笨重的設備,這違背了HRC倡導的靈活交互原則,」張澤群、季雨辰及其同事寫道在他們的論文中。
「此外,目前的方法沒有在統一的空間中對人類和機器人進行建模,這既不直觀,也不方便感知和理解整體環境。為了解決這些局限性,本文提出了一種用於HRC 的數字孿生系統。
張、季及其同事創建的數位孿生系統創建了人類和機器人代理協作場景的虛擬複製品。隨後,它規劃有效的協作策略並在現實環境中執行它們。
人們發現,先前提出的依賴於運動捕捉感測器收集的數據的數位孿生系統有時在存在遮蔽的情況下(即,當感興趣的物體或代理位於感測器視野之外或隱藏在障礙物後面時)會取得不令人滿意的結果)。研究人員因此開發了一種人體網格恢復演算法,這是一種可以幫助重建被遮蔽的人體的計算技術。
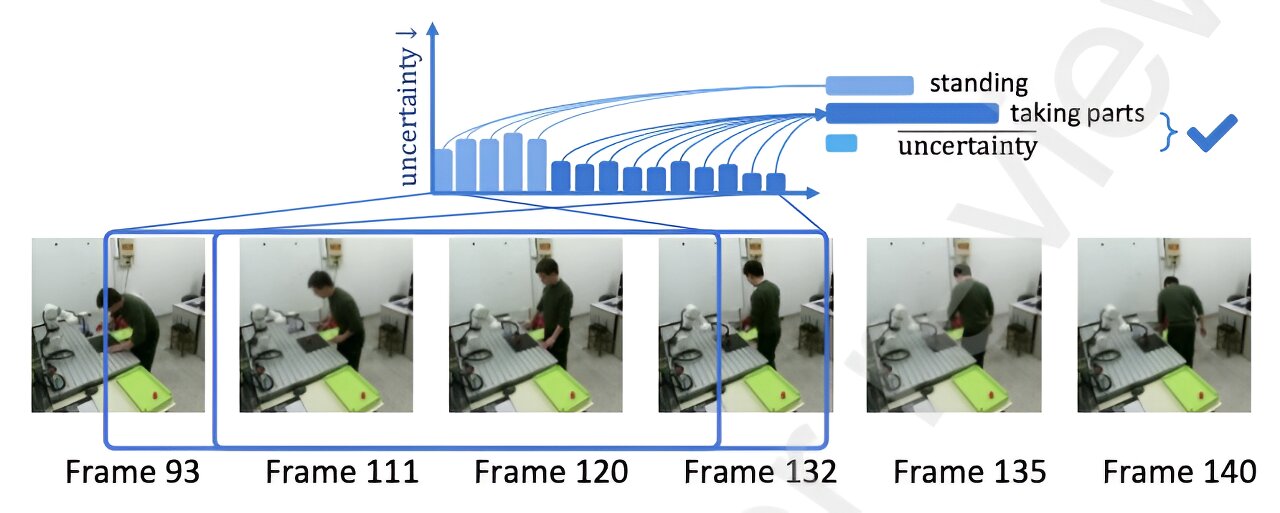
此外,Zhang、Ji 和他們的同事在他們的系統中引入了一種不確定性估計技術。這項技術使他們能夠透過控制演算法出錯的風險來增強動作辨識演算法的性能,動作辨識演算法是他們的系統的一個組件,經過訓練可以識別不同的人類動作。
研究人員使用設計用於工業環境中部署的機器人,在實驗室環境中進行了一系列實驗,評估了他們的新數位孿生系統。他們的系統被發現可以增強機器人和人類代理在各種任務中的協作,包括涉及拋光、拾取、組裝和放置物體的任務。
「實驗結果證明了所提出的方法相對於基線方法的優越性,」張、吉和他們的同事說。“最後,透過涉及組件組裝的案例研究驗證了 HRC 系統的可行性和有效性。”
張、吉和他們的同事開發的數位孿生系統很快就會在其他工業用途機器人上實施,並在額外的實驗中進一步測試,最終可以將其引入現實世界中,以增強機器人與人類之間的協作各種製造和工業任務。
更多資訊:Zequn 張等人,使用數位孿生系統實現人類與機器人之間的協作組裝,機器人與電腦整合製造(2023)。DOI:10.1016/j.rcim.2023.102691。© 2023 Science X 網絡
引文
:可增強人機協作產品組裝的數位孿生系統(2023 年,12 月 17 日)檢索日期:2023 年 12 月 17 日來自 https://techxplore.com/news/2023-12-digital-twin-collaborative- human-robot-product.html
本文檔受版權保護。除了出於私人學習或研究目的的任何公平交易外,不得未經書面許可,不得複製部分內容。所提供的內容僅供參考。