. DOI: 10.1126/scirobotics.adl0307")
Scientists at Nanyang Technological University, Singapore (NTU Singapore), have developed an innovative wearable fabric that is flexible but can stiffen on demand.
Developed through a combination of geometric design, 3D printing, and robotic control, the new technology, RoboFabric, can quickly be made into medical devices or soft robotics, such as limbs for drones.
The NTU research team has developed an elbow support from the versatile material, helping people carry heavier loads. A wrist support prototype has also been made, which could help stabilize joints for daily activities and benefit patients with Parkinson's Disease who experience trembling.
Inspired by the scales of pangolins and armadillos which interlock to form a protective shell, the first step in making the patent-pending technology is an advanced mathematical algorithm that designs an interlocking system of tiles.
The 3D-printed tiles are then joined together by metal fibers running through tiny channels between them, or by an external soft case, which requires negative air pressure or vacuum to be applied constantly.
When the fibers are contracted, the tiles interlock and stiffen, increasing the rigidity of RoboFabric over 350 times and providing additional strength and stability.
According to the research team's findings published in Advanced Materials, human muscle activity can be reduced by up to 40% when the device assists joints while lifting loads.
Lead scientist, Nanyang Assistant Professor Wang Yifan from the NTU School of Mechanical and Aerospace Engineering, said, "We were inspired by how animals often have multiple functionalities for their limbs through the use of intricate structures, much like the shape-morphing and stiffness-variation in octopuses."
"We envision that in future, patients who need a plaster cast for fractures would have the option of customizing a flexible limb support that is fabric-like before stiffening. Unlike conventional rigid and unremovable casts, they would also be easy to put on or remove at the touch of a button. In daily use, joint supports can also help the elderly in their daily tasks, helping to reduce the muscle strength needed for heavier loads," added Prof Wang, who is also from the NTU Robotics Research Center.
To customize the joint support, a 3D scan of a wrist or the elbow is uploaded to proprietary software, through which a special algorithm can automatically dissect a 3D model into dozens of geometric tiles that can be 3D printed in just an hour.
The metal fibers must then be threaded through the holes between the tiles and connected to an electric device that can quickly tighten or loosen the cables.
This threading process is currently done by hand, but the team says it could be automated in future, similar to how badminton racquets are re-strung using a machine.
Giving an independent comment on the RoboFabric technology, Adjunct Associate Professor Loh Yong Joo, Head and Senior Consultant at the Department of Rehabilitation Medicine, Tan Tock Seng Hospital (TTSH), said the NTU invention holds some promise for applications in rehabilitation medicine.
"This technology could be potentially useful in several cases, such as individuals with joint injuries, as it could allow safe adjustment of movement range during recovery.
For those with upper limb motor weakness, such as post-stroke patients, RoboFabric could provide support to perform some functional tasks," said Prof Loh, who is also the Director of Clinical Innovations at TTSH.
"Additionally, individuals with movement disorders like Parkinson's disease may benefit from the stability RoboFabric offers, which stabilizes the movement trajectory to complete functional tasks safely. If adapted for knee applications in future, it may even serve as a stabilizing orthosis to improve gait patterns and help prevent falls."
Useful for robots and drones
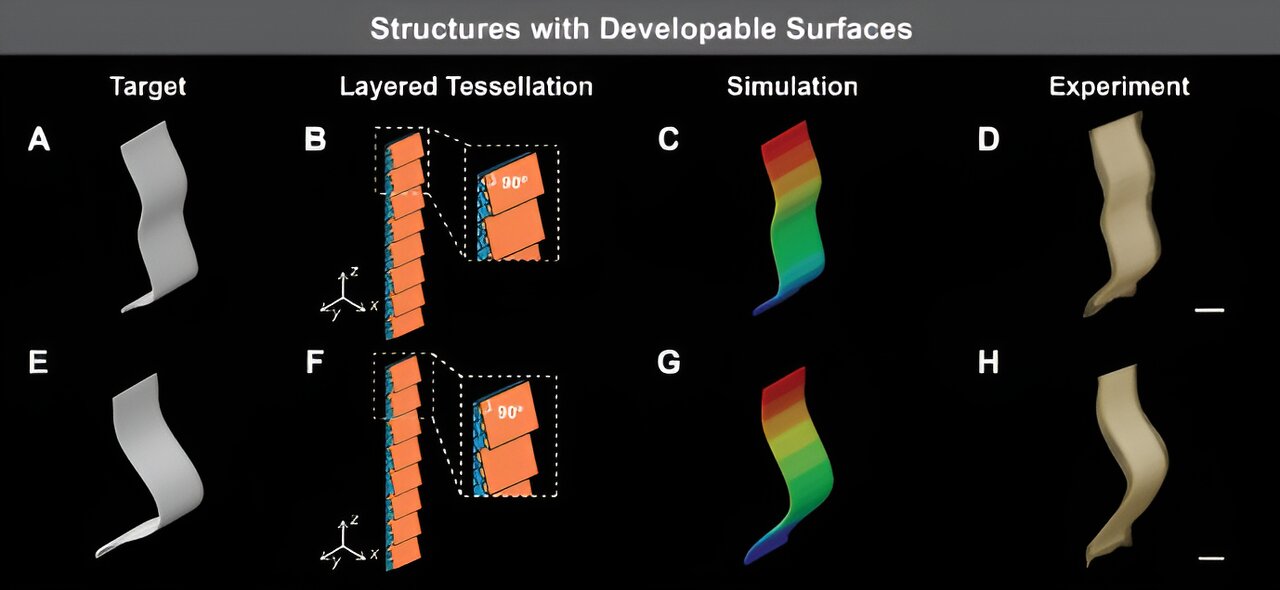
RoboFabric could also be applied in robotics. In their latest research paper, published in Science Robotics, Prof Wang's team demonstrates a tiny robot made of thin waveshaped tiles sealed in an elastic envelope.
When a vacuum is applied, the RoboFabric transitions to its designated shape and becomes stiff. Conversely, when the vacuum pressure is removed, it relaxes into a soft state.
This actuation of stiffening and softening allows the small robot to climb like a worm or swim in water, carrying small loads or protecting fragile assets by forming a rigid shell around them. These capabilities are important for exploration and rescue robots that need to move in complex terrains and provide protection on demand.
In another demonstration, four such robots are combined to form a robotic gripper on a drone. When made rigid, the soft gripper curls up and can pick up small items, similar to a claw machine. To drop the items, it relaxes.
The gripper doubles up as a shock-absorbing pad for hard landings when it curls up. While soft, the grippers can be folded into the drone body and do not affect its flight function.
The team is exploring collaborations with industry partners who have expressed interest in the technology and are hoping to partner with them for deployment trials in the health care and robotics sectors, as this made-in-Singapore technology offers new solutions for medical support and enhances the functionality of drones or exploration robots.
More information: Xudong Yang et al, Active Fabrics With Controllable Stiffness for Robotic Assistive Interfaces, Advanced Materials (2024). DOI: 10.1002/adma.202404502
Tianyu Chen et al, Scale-inspired programmable robotic structures with concurrent shape morphing and stiffness variation, Science Robotics (2024). DOI: 10.1126/scirobotics.adl0307
Citation: Scientists develop 3D-printed active fabric for medical devices and soft robotics (2024, July 18) retrieved 18 July 2024 from https://techxplore.com/news/2024-07-scientists-3d-fabric-medical-devices.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no part may be reproduced without the written permission. The content is provided for information purposes only.