
The development and testing of algorithms for robotics applications typically requires evaluations in both simulated and physical environments. Some algorithms, however, can be difficult to deploy in simple hardware experiments, due to the high costs of robotics hardware or to difficulties associated with setting up this hardware inside robotics labs. Moreover, often developers lack reliable software that would allow them to integrate their algorithms on a specific robotics platform.
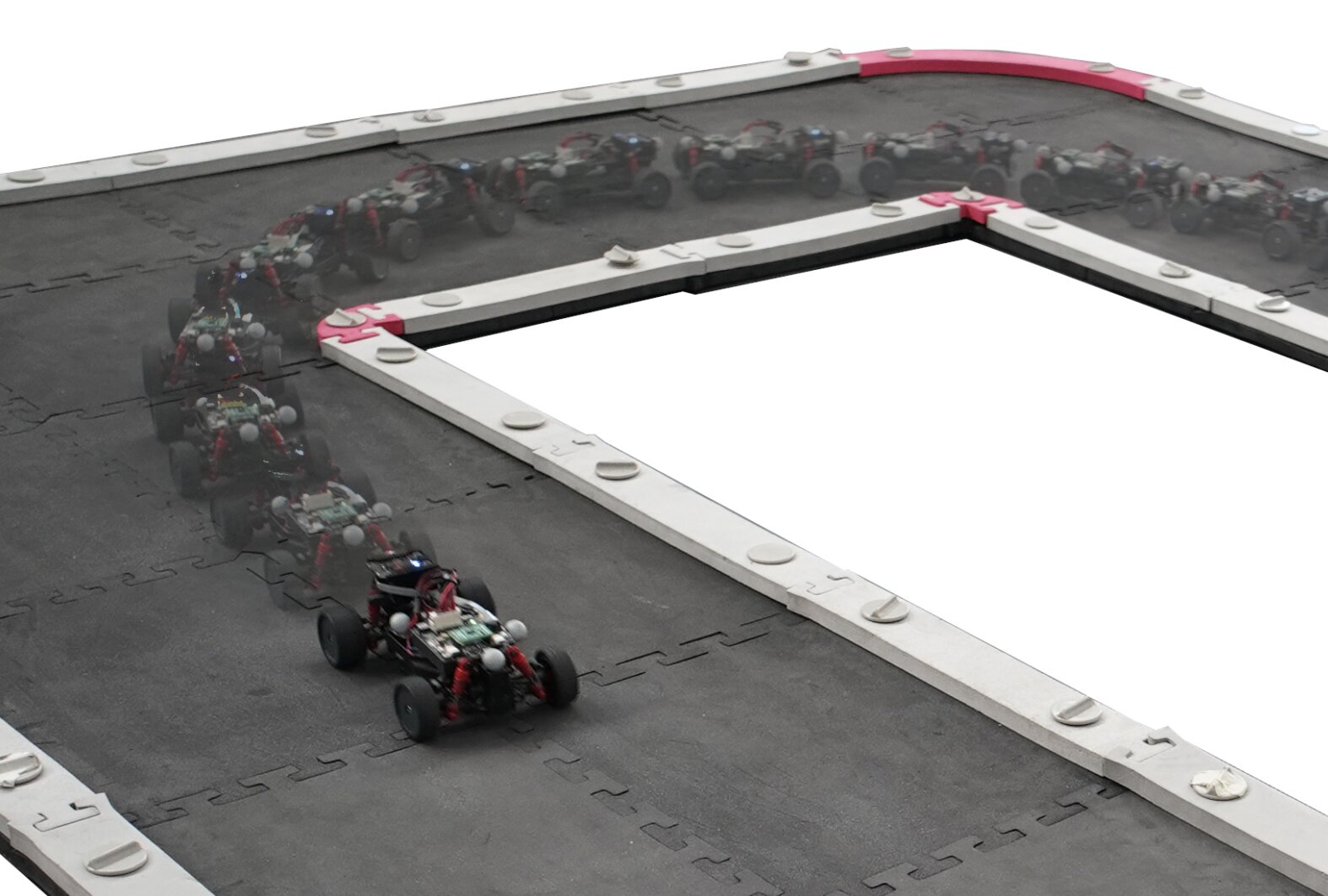
A team of researchers at ETH Zurich's Institute for Dynamic Systems and Control recently introduced a new miniature car-like robot and an associated software kit that could simplify the testing of some algorithms for robotics applications. Their hardware and software solutions, introduced in a paper pre-published on arXiv, are more affordable than many similar platforms and are easier to set up within laboratory settings.
"This paper presents an open-source miniature carlike robot with low-cost sensing and a pipeline for optimization-based system identification, state estimation, and control," Sabrina Bodmer, Lukas Vogel and their colleagues wrote in their paper. "The overall robotics platform comes at a cost of less than $700 and thus significantly simplifies the verification of advanced algorithms in a realistic setting."
The hardware developed by Bodmer, Vogel and their colleagues is an upgraded version of Chronos, a low-cost car-like robot that they presented at the 2023 IEEE International Conference on Robotics and Automation (ICRA). The new version of the miniature car has a similar body structure, but it also includes custom-built wheel encoders and an off-the-shelf Lighthouse positioning deck.
The data collected by the car's sensors can be used to estimate the state of the car with high accuracy. The researchers also developed firmware, software, and detailed hardware designs that could be used by other teams to deploy their car within their laboratories.
"We also present a modified bicycle model with Pacejka tire forces to model the dynamics of the considered all-wheel drive vehicle and to prevent singularities of the model at low velocities," Bodmer, Vogel and their colleagues wrote. "Furthermore, we provide an optimization-based system identification approach and a moving horizon estimation (MHE) scheme."
Notably, the robotics platform developed by Bodmer, Vogel and their colleagues is modular, which means that it can be adapted to test algorithms for various other systems, including model rockets and multi-agent robot teams. The researchers have already tested their hardware and software in several real-world experiments, which confirmed their potential for robotics research.
"In extensive hardware experiments, we show that the presented system identification approach results in a model with high prediction accuracy, while the MHE results in accurate state estimates," Bodmer, Vogel and their colleagues wrote. "Finally, the overall closed-loop system is shown to perform well even in the presence of sensor failure for limited time intervals."
The team's hardware, firmware and software was made available on GitHub and could soon be used by others within the community to test their algorithms in a laboratory setting. The new robot's relatively low cost and its reliable supporting software could ultimately make it a competitive platform for academic research and laboratory work.
More information: Sabrina Bodmer et al, Optimization-Based System Identification and Moving Horizon Estimation Using Low-Cost Sensors for a Miniature Car-Like Robot, arXiv (2024). DOI: 10.48550/arxiv.2404.08362
Journal information: arXiv
© 2024 Science X Network
Citation: An affordable miniature car-like robot to test control and estimation algorithms (2024, April 29) retrieved 29 April 2024 from https://techxplore.com/news/2024-04-miniature-car-robot-algorithms.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no part may be reproduced without the written permission. The content is provided for information purposes only.