
Four-legged robots, also known as quadrupedal robots, have advantageous characteristics, including the ability to rapidly walk on challenging terrains and keep a low center of gravity. Some four-legged robots can also manipulate objects in their surroundings, yet this is typically achieved using arm-like structures mounted at the top of the robots, rather than the limbs they use to walk.
Researchers at Carnegie Mellon University, University of Washington and Google DeepMind recently developed an innovative quadrupedal robot that can pick up and handle nearby objects using the same legs that it uses to walk. This robotic system, introduced in a paper posted to the preprint server arXiv, was found to be highly dexterous and versatile, successfully completing a wide range of object manipulation tasks.
"Quadrupedal robots are versatile agents capable of performing locomotion and manipulation in complex environments," Ding Zhao, Associate professor directing the CMU Safety AI Lab and corresponding author of this paper, told Tech Xplore. "Traditional designs typically incorporate top-mounted arms for manipulation tasks. However, these configurations may limit the robot's payload, stability, and efficiency. We do not see a dog with an arm on the back in nature," said Zhao.
LocoMan, the new robot designed by Zhao and his colleagues, addresses the limitations of most previously developed quadrupedal robots. The new robot has a unique morphology that allows it to adapt the arrangement of its limbs, so that it can manipulate objects in different ways.
Its unique structure and configuration allow LocoMan to perform 6D pose manipulation in complex environments, including confined spaces. The robot relies on the Loco-manipulator, a newly developed, scalable, low-cost, lightweight and modular manipulator with 3-DoF.

The Loco-manipulator is fairly easy to fabricate and could thus also be deployed on a large scale. The researchers integrated two Loco-manipulators on their robot's front calves, thus ensuring that these calves can also act as hands.
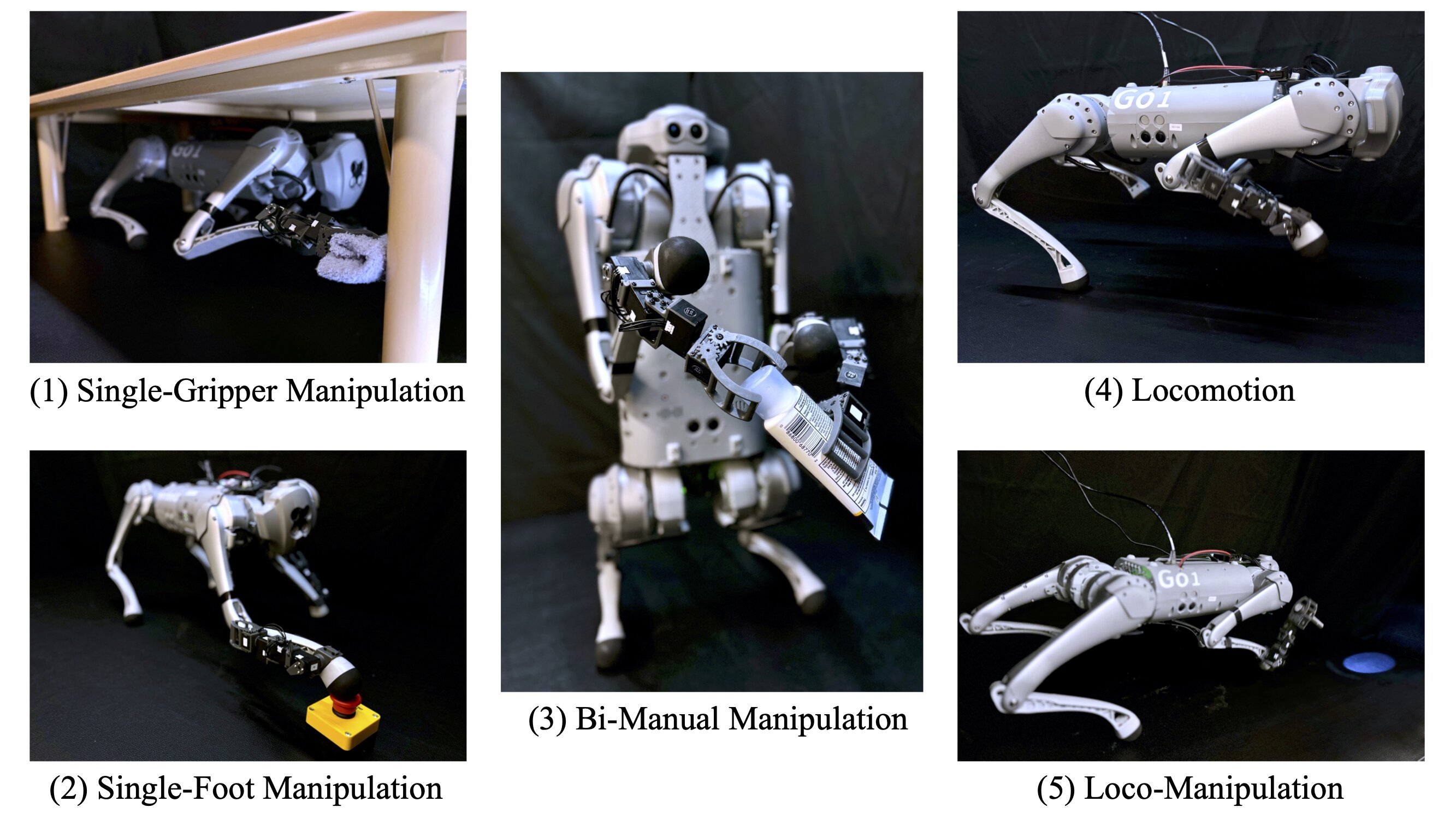
"LocoMan is a versatile quadrupedal robot, consisting of a standard quadrupedal robot and two Loco-manipulators," Changyi Lin, a first year Ph.D. student in Prof Zhao's Lab, explained. "It operates under a comprehensive Whole-Body Control (WBC) framework, facilitating a seamless transition across five operational modes: single-gripper manipulation, single-foot manipulation, bimanual manipulation, locomotion, and loco-manipulation. By equipping the robot with two manipulators on its calves and integrating its original legs, we achieved 6D pose manipulation."
Zhao and his colleagues evaluated their robot in a series of real-world experiments and found that it was remarkably dexterous. In addition to being low-cost and compact, LocoMan can tackle complex manipulation tasks, including opening doors, plugging electronics into sockets and picking up objects in confined spaces.
"Our research offers a different perspective of intelligent robots. Rather than replicating humans with a similar morphology, we would like to provide a complementary robot that can do what humans may not want to do," Zhao said. "LocoMan makes it possible for quadrupedal robots to perform complex manipulation tasks in narrow spaces."
The new robot introduced in this recent paper could soon be tested in a wider range of settings and could eventually be used to tackle real-world problems. In their next studies, Zhao and his colleagues plan to further enhance their robot's capabilities using cutting-edge computer vision and machine learning algorithms.
"The integration of vision-language models is anticipated to revolutionize how LocoMan generates actions," Zhao added. "This could be achieved by interpreting visual perception of environments and processing verbal instructions from humans, enabling a more intuitive and seamless interaction."
More information: Changyi Lin et al, LocoMan: Advancing Versatile Quadrupedal Dexterity with Lightweight Loco-Manipulators, arXiv (2024). DOI: 10.48550/arxiv.2403.18197
Journal information: arXiv
© 2024 Science X Network
Citation: A dexterous four-legged robot that can walk and handle objects simultaneously (2024, April 19) retrieved 19 April 2024 from https://techxplore.com/news/2024-04-dexterous-legged-robot-simultaneously.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no part may be reproduced without the written permission. The content is provided for information purposes only.