. DOI: 10.1007/s10015-024-00943-w")
Robots with wheels could potentially navigate a variety of indoor and outdoor environments, traveling for longer distances and with fewer risks of losing balance. While some wheeled robots have achieved very promising results in recent years, most of them are unable to reliably overcome steps (i.e., surfaces that are raised above ground level).
The inability of many wheeled robots to overcome steps limits their real-world implementations, by increasing the risk that they will get stuck on a step and fail to complete missions. A potential design that could help to overcome this limitation entails eliminating rims from wheels, which produces a walking-like locomotion style instead of a conventional rolling motion.
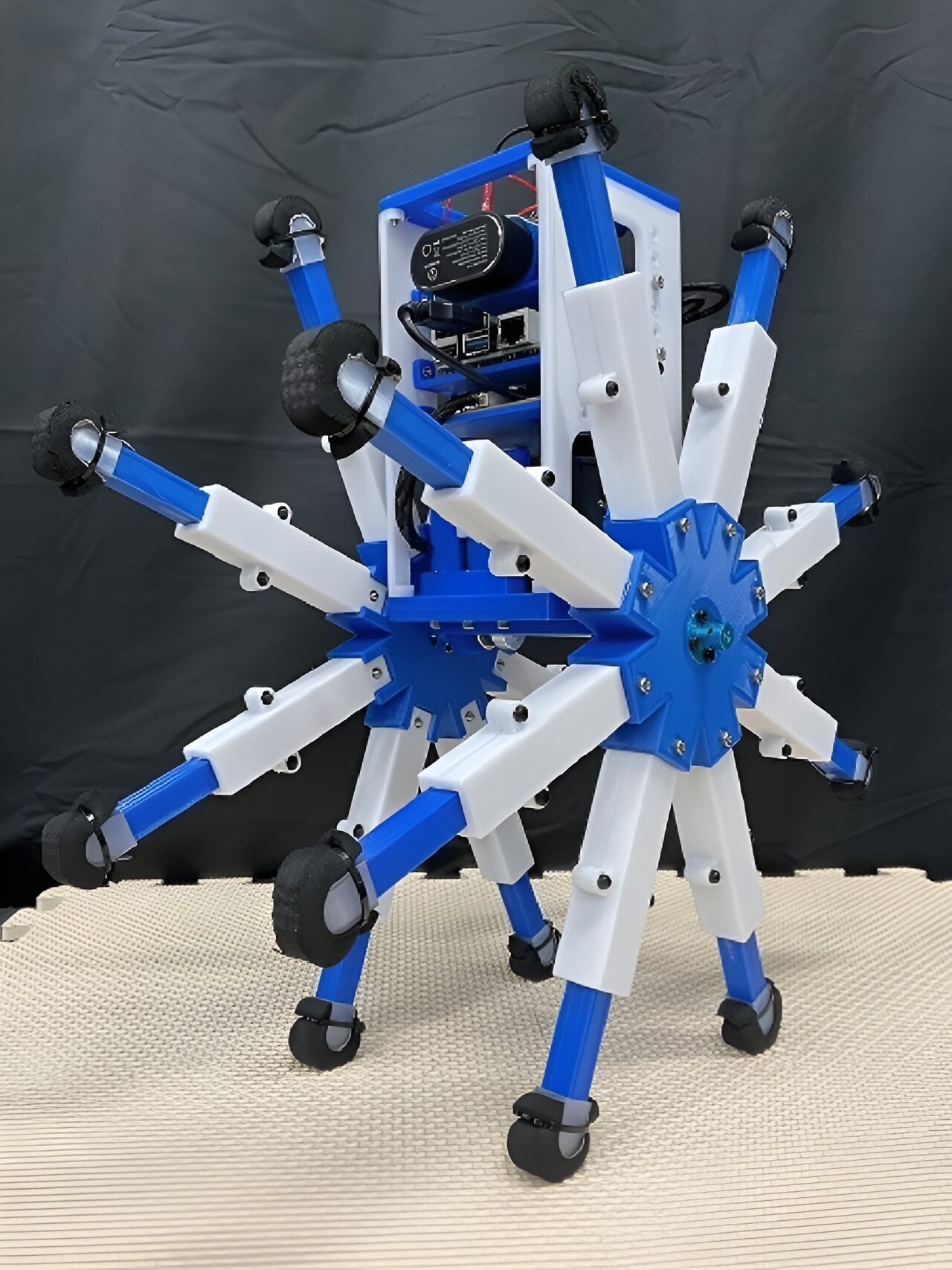
Researchers at Kyushu Institute of Technology recently developed a new rimless wheel-based robot with a unique structure that allows it to better navigate environments with steps or uneven terrains. This robot, introduced in a paper in Artificial Life and Robotics, has elastic, telescopic legs that exhibit highly complex dynamics and a walking-like motion.
"We developed a rimless wheel robot with elastic telescopic legs that can overcome steps," Yuta Hanazawa, Yuhi Uchino and Shinichi Sagara wrote in their paper. "Numerical studies have shown that a rimless wheel robot with elastic telescopic legs has high adaptability to steps. However, rimless wheel robots that can walk in environments with steps have not yet been developed."
. DOI: 10.1007/s10015-024-00943-w")
Hanazawa, Uchino and Sagara first developed a three-dimensional (3D) model of their rimless wheel robot using computer-aided design (CAD) software. Subsequently, they ran simulations to estimate the motions that this modeled robot would produce while moving on the ground.
These simulations allowed them to derive the optimal elasticity for the legs to reliably overcome steps. Finally, the team fabricated a prototype of their rimless wheel robot and tested its performance in a series of real-world experiments.
"To develop a rimless wheel robot that could overcome the steps, we initially developed a three-dimensional model of the robot through Unity software and simulated its walking on level ground and surfaces with steps," Hanazawa, Uchino and Sagara wrote. "Then, we determined the optimal elasticity of the elastic telescopic legs through numerical simulation and constructed a model with optimized parameters."
. DOI: 10.1007/s10015-024-00943-w")
To test their robot's performance and its ability to overcome steps, the researchers carried out a series of experiments, where their prototype had to walk on ground level or overcome a 0.03m step. Their results were promising, as the robot was able to overcome the step rapidly, without getting stuck or losing balance.
In their next studies, Hanazawa, Uchino and Sagara plan to continue testing their robot, while also trying to improve its control and lower its power consumption. Moreover, they intend to adapt their design to fabricate a one-wheeled robot based on their design that can smoothly move in confined spaces.
The new robot introduced by these researchers could soon inspire other roboticists to experiment with rimless wheel-based designs. This could result in the development of innovative wheeled robots that are more versatile and are suitable for a wider range of applications.
More information: Yuta Hanazawa et al, Development of a rimless wheel robot with telescopic legs for step adaptability, Artificial Life and Robotics (2024). DOI: 10.1007/s10015-024-00943-w.
© 2024 Science X Network
Citation: A rimless wheel robot that can reliably overcome steps (2024, April 17) retrieved 17 April 2024 from https://techxplore.com/news/2024-04-rimless-wheel-robot-reliably.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no part may be reproduced without the written permission. The content is provided for information purposes only.