
Vehicles that can drive themselves have been a long sought after goal both of robotics research and the automotive industry. While various companies have been investing in these vehicles and testing them, they have so far only deployed them in a limited number of settings.
In recent years, some researchers have been exploring the possibility of so-called "automated valet parking" (AVP), a function that would allow a car to drive itself from the entrance of a parking to a free parking spot. While this autonomous driving application gathered substantial research interest, its reliable realization has so far proved challenging.
Researchers at Mach Drive in Shanghai recently developed OCEAN, an Openspace Collision-freE trAjectory plaNner for the autonomous parking of vehicles. This planner, introduced in a paper pre-published on arXiv, was found to significantly enhance the ability of cars to safely reach a parking spot, without colliding with objects on the way.
"We propose an Openspace Collision-freE trAjectory plaNner (OCEAN) for autonomous parking," Dongxu Wang, Yanbin Lu and their collaborators wrote in their paper. "OCEAN is an optimization-based trajectory planner accelerated by Alternating Direction Method of Multiplier (ADMM) with enhanced computational efficiency and robustness, and is suitable for all scenes with few dynamic obstacles."
The new planner developed by the researchers was designed to overcome the two primary shortcomings of approaches presented in previous studies tackling autonomous parking. The first of these is the inability to accurately predict collisions, while the second entails poor performance in real-time tests.
The OCEAN planner builds on a previously introduced approach called Hybrid Optimization-based Collision Avoidance (H-OBCA), addressing its primary limitations. Its improved design ultimately improves its ability to avoid collisions, along with its robustness and speed in real time.
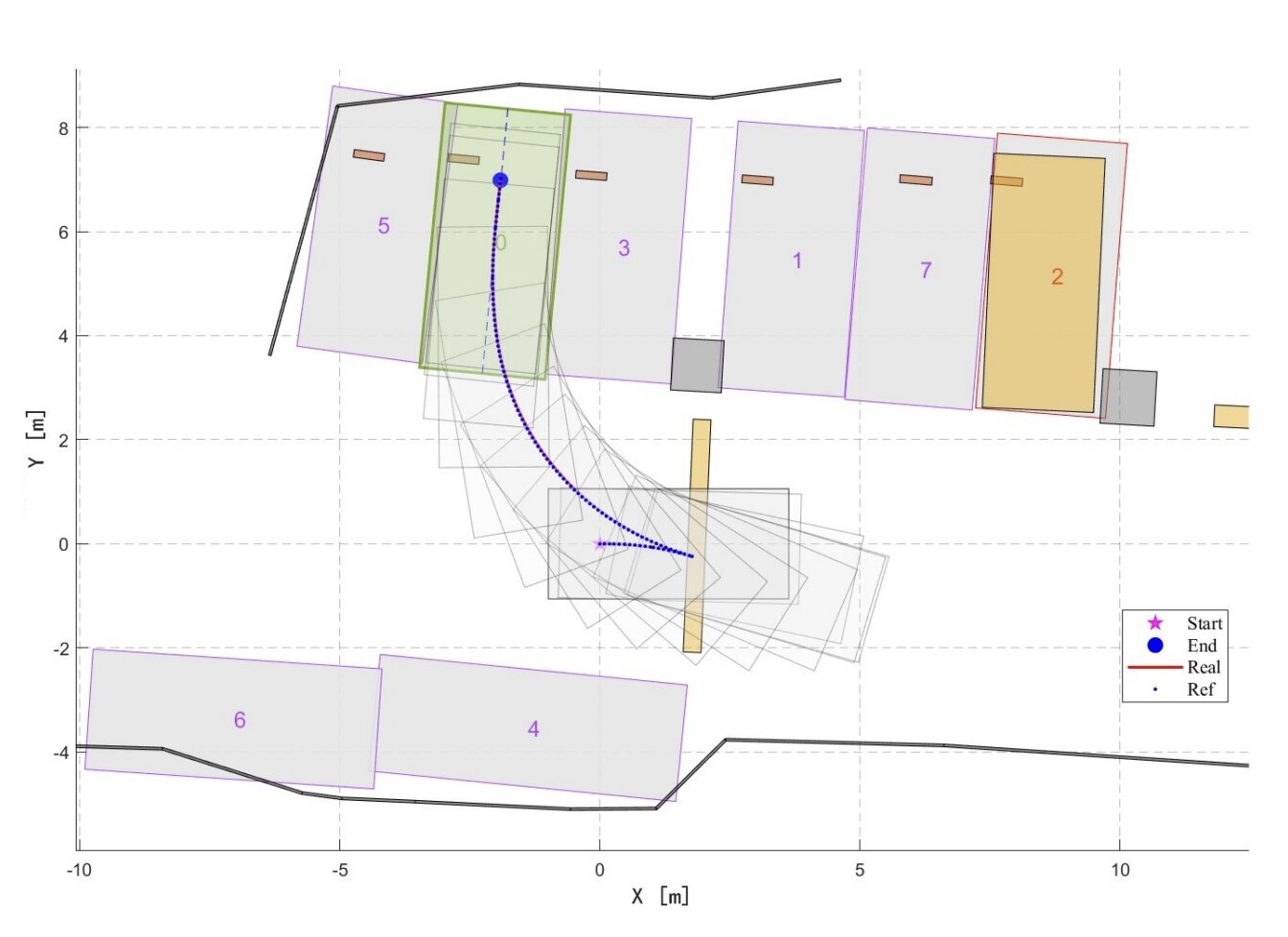
"Starting from a hierarchical optimization-based collision avoidance framework, the trajectory planning problem is first warm-started by a collision-free Hybrid A* trajectory," Wang, Lu and their colleagues wrote in their paper.
"Then the collision avoidance trajectory planning problem is reformulated as a smooth and convex dual form and solved by ADMM in parallel. The optimization variables are carefully split into several groups so that ADMM sub-problems are formulated as Quadratic Programming (QP), Sequential Quadratic Programming (SQP), and Second Order Cone Programming (SOCP) problems that can be efficiently and robustly solved."
Wang, Lu and their collaborators tested their planner on hundreds of simulated scenarios and conducted real-world experiments in public parking areas. Their results were highly promising, as OCEAN was found to outperform a variety of methods for autonomous parking applications.
"Results show that the proposed method has better system performance compared with other benchmarks," Wang, Lu and his colleagues explained in their paper. "Our method makes it possible to deploy large-scale parking planner on low computing power platforms that require real-time performance."
The planner developed by this team of researchers could be improved and tested in additional real-world trials. In the future, it could be deployed by automotive companies, contributing to the introduction of automated vehicle parking technologies.
More information: Dongxu Wang et al, OCEAN: An Openspace Collision-free Trajectory Planner for Autonomous Parking Based on ADMM, arXiv (2024). DOI: 10.48550/arxiv.2403.05090
Journal information: arXiv
© 2024 Science X Network
Citation: An optimization-based method to enhance autonomous parking (2024, March 30) retrieved 30 March 2024 from https://techxplore.com/news/2024-03-optimization-based-method-autonomous.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no part may be reproduced without the written permission. The content is provided for information purposes only.