
Researchers at ETH Zurich have recently developed artificial muscles for robot motion. Their solution offers several advantages over previous technologies: It can be used wherever robots need to be soft rather than rigid or where they need more sensitivity when interacting with their environment.
Many roboticists dream of building robots that are not just a combination of metal or other hard materials and motors but also softer and more adaptable.
Soft robots could interact with their environment in a completely different way; for example, they could cushion impacts the way human limbs do, or grasp an object delicately. This would also offer benefits regarding energy consumption; robot motion today usually requires a lot of energy to maintain a position, whereas soft systems could store energy well, too. So, what could be more obvious than to take the human muscle as a model and attempt to recreate it?
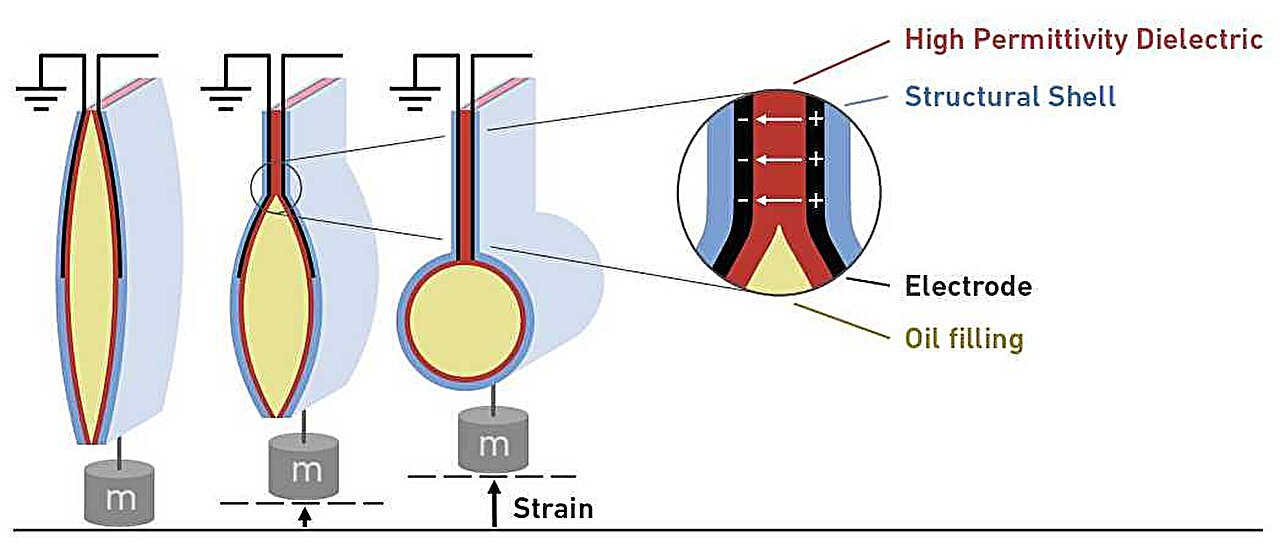
The functioning of artificial muscles is thus based on biology. Like their natural counterparts, artificial muscles contract in response to an electrical impulse. However, the artificial muscles consist not of cells and fibers but of a pouch filled with a liquid (usually oil), the shell of which is partially covered in electrodes.
When these electrodes receive an electrical voltage, they draw together and push the liquid into the rest of the pouch, which flexes and is thus capable of lifting a weight. A single pouch is analogous to a short bundle of muscle fibers; several of these can be connected to form a complete propulsion element, which is also referred to as an actuator or simply as an artificial muscle.
Voltage too high
The idea of developing artificial muscles is not new, but until now, there has been a major obstacle to realizing it: Electrostatic actuators worked only with extremely high voltages of around 6,000 to 10,000 volts. This requirement had several ramifications; for instance, the muscles had to be connected to large, heavy voltage amplifiers; they did not work in water; and they weren't entirely safe for humans.
A new solution has now been developed by Robert Katzschmann, a robotics professor at ETH Zurich, together with Stephan-Daniel Gravert, Elia Varini and further colleagues. They have published their version of an artificial muscle that offers several advantages in Science Advances.
Gravert, who works as a scientific assistant in Katzschmann's lab, has designed a shell for the pouch. The researchers call the new artificial muscles HALVE actuators, where HALVE stands for "hydraulically amplified low-voltage electrostatic."
"In other actuators, the electrodes are on the outside of the shell. In ours, the shell consists of different layers. We took a high-permittivity ferroelectric material, i.e. one that can store relatively large amounts of electrical energy, and combined it with a layer of electrodes. Next, we coated it with a polymer shell that has excellent mechanical properties and makes the pouch more stable," Gravert explains.
This meant the researchers could reduce the required voltage, because the much higher permittivity of the ferroelectric material allows large forces despite low voltage. Not only did Gravert and Varini develop the shell for the HALVE actuators together, but they also built the actuators themselves in the lab to use in two robots.
Grippers and fish show what the muscle can do
One of these robotic examples is an 11-centimeter-tall gripper with two fingers. Each finger is moved by three series-connected pouches of the HALVE actuator. A small battery-operated power supply provides the robot with 900 volts.
More information: Stephan-Daniel Gravert et al, Low-voltage electrohydraulic actuators for untethered robotics, Science Advances (2024). DOI: 10.1126/sciadv.adi9319
Citation: Soft artificial muscles developed for robot motion (2024, January 30) retrieved 30 January 2024 from https://techxplore.com/news/2024-01-soft-artificial-muscles-robot-motion.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no part may be reproduced without the written permission. The content is provided for information purposes only.