
A team of researchers at Zhejiang University has created a new robot gripper using a shape memory polymer. In their paper published in the journal Science Advances, the group describes the material, its use as a gripper, and how well it worked.
Over the past several decades, scientists have used a variety of approaches to give a robot the ability to pick up and manipulate objects and to set them back down—all without damaging the object. Much progress has been made in robot grippers, due mostly to advances in microchip technology, but there is still a lot of room for improvement. One of the biggest challenges is developing a gripper that can pick up and manipulate objects of nearly any shape, different sizes, and made from different materials. Creating a human hand-like gripper that is able to pick up a pin off of a table, carry a raw egg across a room or tie a child's ribbon in her hair, requires a very highly sophisticated gripper and associated software. In this new effort, the researchers have done away with the need for sophistication by taking an entirely different approach.
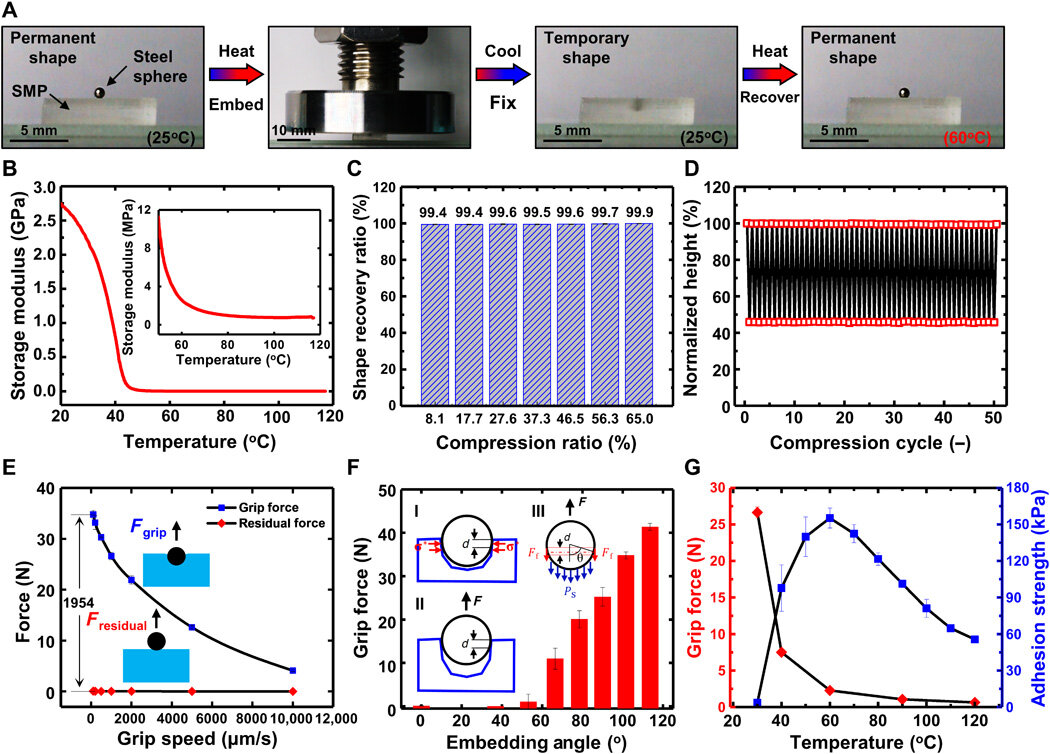
Prior research has shown that when certain polymers are heated, they expand slightly and grow soft. The researchers used both properties to create their new gripper. They created a polymer gripper that softens when heated to 45°C and then hardens again when exposed to 25°C. Its base shape is cuboid (a 3-D rectangle). They then affixed the gripper to a simple arm that was able to place the gripper down against a tabletop or lift it just above the table—enough to allow placement of various objects underneath.
Testing involved placing an object such as a small steel ball beneath the gripper and then heating the entire apparatus in an enclosure to 45°C. After a few minutes, the polymer had softened. The researchers then lowered the gripper to the object, allowing the object to be encompassed—similar to setting a softened stick of butter on a fork. The temperature in the enclosure was then reduced to 25°C. At that point, the polymer shrank slightly, gripping the object as it firmed. The researchers then raised the gripper and the object it was holding. To set the object back down, the researchers lowered the gripper to the table and raised the temperature in the enclosure to 45°C.
More information: Changhong Linghu et al. Universal SMP gripper with massive and selective capabilities for multiscaled, arbitrarily shaped objects, Science Advances (2020). DOI: 10.1126/sciadv.aay5120
© 2020 Science X Network
Citation: Using a shape memory polymer as a robot gripper (2020, February 17) retrieved 17 February 2020 from https://techxplore.com/news/2020-02-memory-polymer-robot-gripper.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no part may be reproduced without the written permission. The content is provided for information purposes only.