
Four-dimensional (4-D) printing is based on merging multimaterial printing, reinforcement patterns or micro and nanofibrous additives as time-related programmable tools, to achieve desired shape reconfigurations. However, the existing programming approaches still follow an origami design principle to generate reconfigurable structures using self-folding and stacked 2-D materials at small scales. In a new report on Science Advances, T. Y. Huang and a team of interdisciplinary, international researchers in the U.S. and China proposed a programmable modular design to directly construct 3-D reconfigurable microstructures capable of 3-D-to-3-D transformations via 4-D micro-building block assembly.
The researchers used 4-D direct laser writing to print two-photon polymerizable and stimuli-sensitive hydrogels as the building material and engineered the building blocks at the micrometre-scale. The team introduced Denavit-Hartenberg (DH) parameters that are typically used to define robotic arm kinematics (movement) as a guideline to assemble micro-building blocks and plan the 3-D motion of assembled chain blocks. They also 3-D printed a microscale transformer to change shape from a race car to a humanoid robot (much like the movie yet in small-scale and in acidic solution) to guide the motion of a variety of assembled compartments for the first time in the lab.
Shape-morphing systems have wide-ranging applications in camouflage, as soft robotic actuators and in biomedical devices to coordinate machines and their environments. Researchers can use computational origami designs as standard 2-D material platforms to construct coordinated self-morphing (self-shaping), 3-D morphing machines. Self-shaping is a unique and powerful technique used to construct small-scale machines for wireless shape change actuation, without depending on manual assembly processes. Materials scientists had also programmed shape transformations within 2-D materials by introducing fibrous micro- and nanoarchitectures to create stimuli-responsive gels or shape memory polymers. Recent advances in 3-D printing have conveniently allowed researchers to directly print machines with spatially controlled mechanical properties. However, existing state-of-the-art 3-D morphing machines still rely on 3-D printing that is based on a template of planar 2-D self-folding origami counterparts.

A programmable design technique to successfully form 3-D-to-3-D shape transformations is limited due to the increased computational complexity required to design such architecture. So far researchers have relied on finite element analysis (FEA) to simulate shape transformations of direct 3-D printed structures, however, the process is time-consuming with increasing 3-D structural complexity. While it is possible to design several algorithms to automatically generate the design assembly and motion in modular robots, the concept cannot be applied to small-scale machines.
In the present work, Huang et al. therefore proposed a programmable morphing modular (custom) design, inspired via modular robotics and LEGO-like building blocks. The team facilitated the design of complex 3-D-to-3-D shape transformations using direct 3-D printed microstructures. They used 4-D direct laser writing (4-D DLW) at submicron resolution to build a variety of micro-scale shape-morphing building blocks, controlled via the laser dosage, to assist the transition. Alongside laser writing for modular design, the scientists captured forward and inverse kinematics using DH (Denavit-Hartenberg) parameters and introduced FEA to quantitatively study the deformation of building blocks. The DH parameters also allowed them to assemble motion of 3-D compartments for complex 3-D-to-3-D transformations by reducing the computational load.

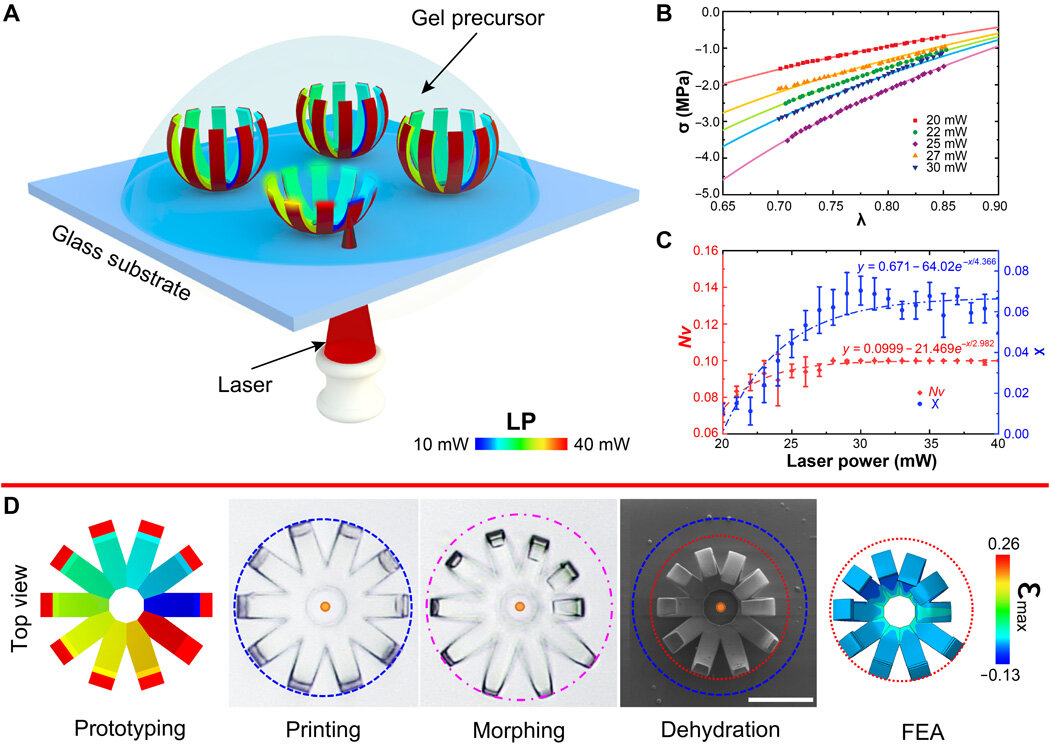
4-D printing largely relies on mathematics to deal with sophisticated forward and inverse problems and its success depends on the accuracy of computational models relative to the experimental results. Since FEA invites a heavy computational load, Huang et al. proposed a modular design to reconstruct a large and complicated 3-D structure and its shape transformation using small and discretized building blocks for which they introduced FEA based on the Flory theory to study the deformation of each building block. The scientists conducted micromechanical compression tests in an alkaline solution to characterize the stress and strain relationship of the polymerized gels as a function of laser power.
After characterizing the material, Huang et al. conducted a finite element simulation based on the commercial software Abaqus to predict the shape evolution of 3-D structures with varying chemical potential. To initially verify the accuracy of the FEA prediction, they formed a micro-flower containing 10 bilayer-like petals each encoded with different laser dosages to allow diverse morphing curvatures to swell and shrink in different environments. The printed structure shrank considerably in acidic solutions—the dominant driving force facilitating deformation in printed building blocks.

Huang et al. then represented the 4-D building blocks as cubic cells with a bilayer configuration containing active and passive materials. They calculated the binding curvature of the formulated micro-building blocks, fine-tuned by their slenderness ratio and laser power on the active layer. To assemble and plan the motion of the modular system, Huang et al. considered the overall structural stiffness, freedom of assembly and programmability of the 4-D micro-building blocks. They accomplished this using an octagonal prismatic microcylinder as the basic building block to construct a larger and more complicated morphing modular system.
The scientists observed self-assembly of multiple building blocks to resemble a robotic arm generating the desired 3-D movements, which they estimated using FEA and the results agreed well with the experiments. However, FEA could not capture motion complexity generated by a larger number of building blocks (n > 60). To address this, Huang et al. introduced DH parameters (Denavit-Hartenberg) with only four physical parameters in a closed analytical form to calculate shape transformations of a robotic arm containing multiple joints and rigid bars. These parameters determined the 3-D transformations and assembly rules of the proposed modular system.

Ultimately, the scientists engineered a micro-scale transformer via 3-D assembly and 3-D motion planning of 4-D building blocks, printed using 4-D DLW. The mini-transformer contained five main functional segments, including the neck, shoulder, arms, backbone and legs, alongside their connections. Huang et al. captured transformations of each compartment via a series of DH parameters and formed a unique shape-morphing transition between a race car and humanoid robot.
The result was a first-in-study to create a mini-transformer that automatically changed its shape to stand up—in the lab. However, it is still challenging to rationally design a transformer that simultaneously morphed without interfering each component for synchronized transformation. While the microscale transformer is an extremely simplified proof-of-principle construct to its larger on-screen counterparts, researchers can engineer real 4-D printed structures with encoded time dimension during printing to facilitate reconfigurable designs and form various compartments to sequentially transform as desired.
In this way, T. Y. Huang and colleagues proposed a programmable modular design based on 4-D micro-building block assembly to aid complex forward and inverse problems of 4-D printing. They used FEA to predict shape evolution of each building block, without considering the whole structure in order to notably reduce computational complexity. The resulting microscale transformer was capable of complex 3-D transformations based on four DH parameters and a single-step DLW fabrication process using photoresponsive hydrogels. Huang et al. foresee that the proposed modular design will pave the way to facilitate new designs of complex 4-D printing.
More information: Matteo Cianchetti et al. Biomedical applications of soft robotics, Nature Reviews Materials (2018). DOI: 10.1038/s41578-018-0022-y
Elliot W. Hawkes et al. A soft robot that navigates its environment through growth, Science Robotics (2017). DOI: 10.1126/scirobotics.aan3028
T.-Y. Huang et al. Four-dimensional micro-building blocks, Science Advances (2020). DOI: 10.1126/sciadv.aav8219
© 2020 Science X Network
Citation: Four-dimensional micro-building blocks: Printable, time-related, programmable tools (2020, January 30) retrieved 30 January 2020 from https://techxplore.com/news/2020-01-four-dimensional-micro-building-blocks-printable-time-related.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no part may be reproduced without the written permission. The content is provided for information purposes only.