
In recent years, research teams worldwide have developed new methods for simultaneous localization and mapping (SLAM). These techniques can be used to construct or update maps of a given environment in real time, while simultaneously tracking an artificial agent or robot's location within these maps.
Most existing SLAM approaches rely heavily on the use of range-based or vision-based sensors, both to sense the environment and a robot's movements. These sensors, however, can be very expensive and typically require significant computational power to operate properly.
Aware of these limitations, researchers at the Singapore University of Technology and Design, Southwest University of Science and Technology, the University of Moratuwa and Nanyang Technological University have recently developed a new technique for collaborative SLAM that does rely on range-based or vision-based sensors. This technique, presented in a paper prepublished on arXiv, could enable more effective robot navigation within unknown indoor environments at a cost significantly lower than that of most previously proposed methods.
"We aimed to utilize low cost and low computational sensor as a replacement for range-based or visual-based sensors," Chau Yuen, one of the researchers who carried out the study, told TechXplore. "Since modern buildings typically have Wi-Fi network coverage, our goal is to utilize such freely available information to perform SLAM."
To exploit radio features that are readily available in most urban environments, the researchers developed an approach for collaborative simultaneous localization and radio fingerprint mapping called C-SLAM-RF. Their technique works by crowdsensing Wi-Fi measurements in large indoor environments and then using these measurements to generate maps or locate artificial agents.
"Our goal is to generate a radio map of the environment with the least human effort possible by leveraging in-built sensing capabilities of commonly used smart phones," Yuen explained.

The system developed by Yuen and his colleagues receives information about the strength of the signal coming from pre-existing Wi-Fi access points spread around a given environment, as well as from pedestrian dead reckoning (PDR) processes (i.e., calculations of someone's current position) derived from a smart phone. It then uses these signals to build a map of the environment without requiring prior knowledge of the environment or the distribution of the access points within it. The C-SLAM-RF tool devised by the researchers can also determine whether the robot has returned to a previously visited location, known as "loop closure," by assessing the similarity between different signals' radio fingerprints.
"Existing SLAM approaches often use dedicated devices, for example, visual cameras or range-based LIDAR sensors, to measure the similarity of observations by scan matching or feature matching, which are computationally expensive," U-Xuan Tan, another researcher involved in the study, told TechXplore. "Our solution exploits the possibility to perform localization and mapping with low-cost, ubiquitous IoT devices like smartphones, due to growing popularity of Wi-Fi wireless networks."
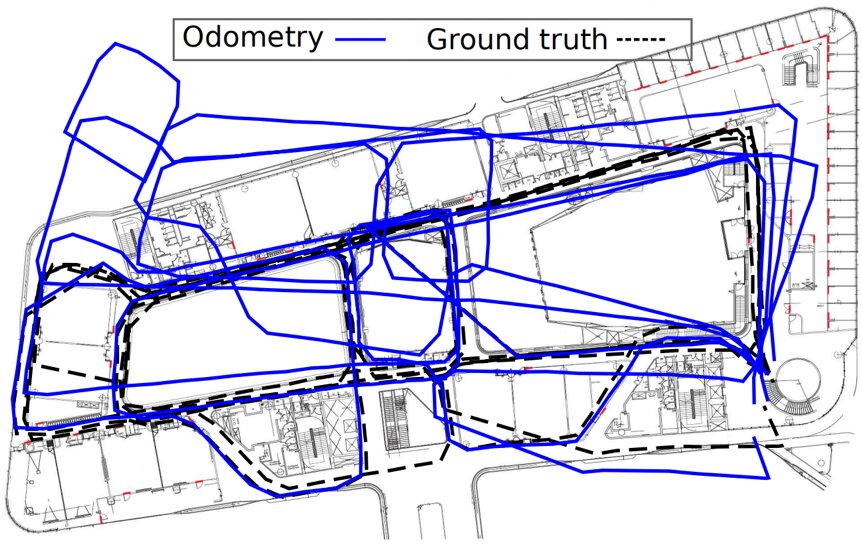
Yuen, Tan and their colleagues tested their technique in an indoor environment with an area of 130 meters x 70 meters. Their results were highly promising, as their system's performance exceeded that of several other existing techniques for SLAM, often by a considerable margin.
"We evaluated our approach in a large scale environment and a positioning accuracy of 0.6 meters is achieved without any prior knowledge of the environment," Ran Liu, another researcher involved in the study, told TechXplore. "This accuracy outperforms state-of-the-art fingerprinting-based localization approach, which requires a tedious survey of the environment. The computational time required by our approach is insignificant when compared to the range-based or visual SLAM."
In the future, the approach for collaborative SLAM devised by this team of researchers could help to enhance robot navigation in unknown environments. In addition, the fact that it does not require the use of expensive sensors and relies on existing Wi-Fi hotspots makes it a more feasible solution for large-scale implementations.
"We would now like to explore the possibility of fusing different radio signals, for example cellular signal, to improve the positioning accuracy," Yong Liang Guan, another researcher involved in the study, told TechXplor. "Another plan is to use the produced radio map for the purpose of localization. A combination with other sensors for example laser range finders to accelerate and improve the mapping in large scale environment will be also one of our future research."
More information: Collaborative SLAM based on Wifi fingerprint similarity and motion information. arXiv:2001.02759 [cs.NI]. arxiv.org/abs/2001.02759
© 2020 Science X Network
Citation: Collaborative simultaneous localization and mapping technique uses available Wi-Fi networks (2020, January 27) retrieved 27 January 2020 from https://techxplore.com/news/2020-01-collaborative-simultaneous-localization-technique-wi-fi.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no part may be reproduced without the written permission. The content is provided for information purposes only.