
캠브리지 대학의 연구팀은 기계 학습 알고리즘을 사용하여 로봇 센서가 점자 텍스트 줄 위로 빠르게 미끄러지도록 가르쳤습니다.
로봇은 분당 315단어로 점자를 거의 90%의 정확도로 읽을 수 있었습니다.
로봇 점자 판독기가 개발되지는 않았지만보조 기술연구원들은 점자를 읽는 데 필요한 높은 감도가 인간의 손가락 끝과 비슷한 감도를 가진 로봇 손이나 보철물 개발에 이상적인 테스트라고 말합니다.그만큼결과일지에 보고된다IEEE 로봇공학 및 자동화 서신.
인간의 손끝은 매우 민감하며 우리 주변 세계에 대한 정보를 수집하는 데 도움이 됩니다.우리의 손가락 끝은 물질 질감의 작은 변화를 감지하거나 물체를 잡을 때 얼마나 많은 힘을 사용해야 하는지를 알 수 있도록 도와줍니다. 예를 들어 달걀을 깨지 않고 집거나 볼링 공을 떨어뜨리지 않고 집는 것과 같습니다.
해당 수준의 감도를 재현로봇 손, 에너지 효율적인 방식으로 이는 큰 엔지니어링 과제입니다.케임브리지 공과대학의 Fumiya Iida 교수 연구실에서 연구자들은 인간이 쉽게 찾을 수 있지만 로봇은 어렵다고 생각하는 이 기술과 다른 기술에 대한 솔루션을 개발하고 있습니다.
논문의 제1저자이자 캠브리지 공과대학의 파트 포다(Parth Potdar) 학부생은 “인간 손끝의 부드러움은 우리가 적절한 양의 압력으로 물건을 잡을 수 있는 이유 중 하나”라고 말했습니다."로봇 공학의 경우 부드러움은 유용한 특성이지만 많은 센서 정보도 필요하며 특히 유연하거나 변형 가능한 표면을 처리할 때 두 가지 정보를 동시에 갖는 것이 까다롭습니다."
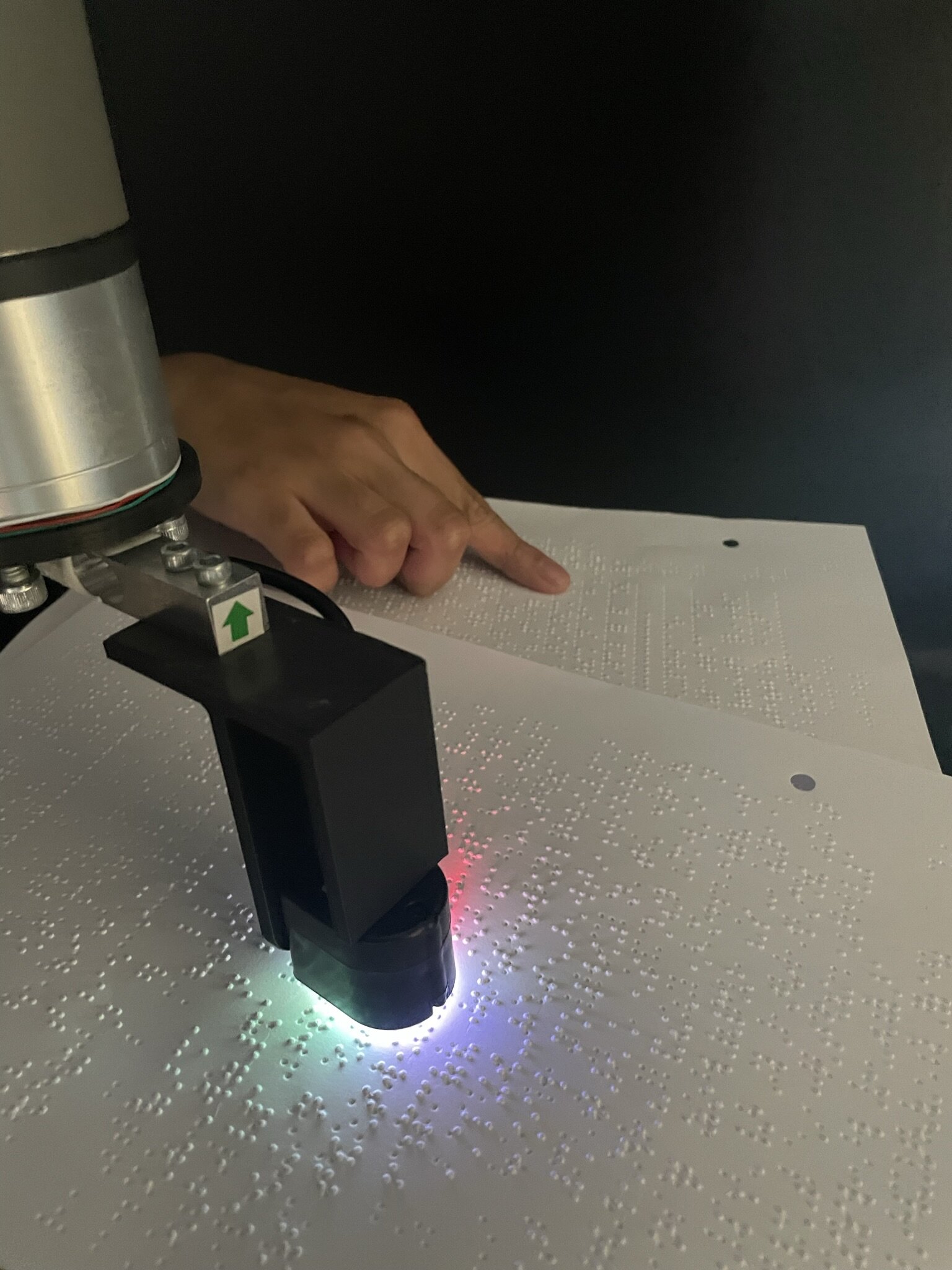
점자는 각 대표 문자 패턴의 점이 서로 너무 가깝기 때문에 높은 감도를 요구하므로 로봇 '손가락 끝'에 대한 이상적인 테스트입니다.연구원들은 기성 센서를 사용하여 인간의 독서 행동을 보다 정확하게 복제하는 로봇 점자 판독기를 개발했습니다.
"기존 로봇 점자 판독기가 있지만 한 번에 한 글자만 읽습니다. 이는 인간이 읽는 방식과 다릅니다"라고 공과대학의 공동 저자인 David Hardman이 말했습니다."기존 로봇 점자 판독기는 정적인 방식으로 작동합니다. 하나의 문자 패턴을 터치하고, 읽고, 표면에서 끌어 올리고, 이동하고, 다음 문자 패턴으로 내려가는 등의 작업을 수행합니다. 우리는 보다 현실적이고 훨씬 더 효율적인 것을 원합니다.."
연구진이 사용한 로봇 센서는 '손끝'에 카메라가 장착되어 있으며 카메라와 센서의 정보를 조합하여 판독합니다.Potdar는 "모션 블러를 제거하기 위해 수행해야 하는 이미지 처리가 많아 시간과 에너지가 많이 소모되기 때문에 이는 로봇 공학자에게 어려운 문제입니다."라고 말했습니다.
팀은 센서가 문자 인식을 시도하기 전에 로봇 판독기가 이미지를 '흐리게 만들' 수 있도록 기계 학습 알고리즘을 개발했습니다.그들은 가짜 흐림 효과가 적용된 선명한 점자 이미지 세트에 대해 알고리즘을 훈련했습니다.알고리즘이 문자의 흐림을 제거하는 방법을 학습한 후 컴퓨터 비전 모델을 사용하여 각 문자를 감지하고 분류했습니다.
알고리즘이 통합된 후 연구자들은 점자 문자 행을 따라 독자를 빠르게 밀어 독자를 테스트했습니다.로봇 점자 판독기는 분당 315단어를 87%의 정확도로 읽을 수 있는데, 이는 인간 점자 판독기보다 두 배 빠르고 정확합니다.
Hardman은 "우리가 기차 알고리즘에 가짜 흐림 효과를 사용했다는 점을 고려하면 점자를 읽는 데 얼마나 정확한지 놀랐습니다."라고 말했습니다."우리는 속도와 정확성 사이에 좋은 균형점을 찾았으며 이는 인간 독자의 경우에도 마찬가지입니다."
"점자 읽기 속도는 촉각 감지 시스템의 동적 성능을 측정하는 좋은 방법이므로 우리의 연구 결과는 다른 분야에도 적용될 수 있습니다.점자로봇 조작 시 표면 질감이나 미끄러짐을 감지하는 것과 같은 응용 분야에 사용됩니다."라고 Potdar는 말했습니다.
앞으로 연구원들은 이 기술을 인간형 손이나 피부 크기로 확장하기를 희망하고 있습니다.
추가 정보:Parth Potdar 외, 생체모방 슬라이딩 상호작용을 통한 고속 촉각 점자 읽기,IEEE 로봇공학 및 자동화 서신(2024).DOI: 10.1109/LRA.2024.3356978
소환:인간의 두 배 속도로 점자를 읽도록 훈련된 로봇 (2024년 1월 29일)2024년 1월 29일에 확인함https://techxplore.com/news/2024-01-robot-braille-humans.html에서
이 문서는 저작권의 보호를 받습니다.사적인 학습이나 조사를 목적으로 하는 공정한 거래를 제외하고는 어떠한 행위도 허용되지 않습니다.서면 허가 없이 일부를 복제할 수 있습니다.콘텐츠는 정보 제공 목적으로만 제공됩니다.