. The gray/white in the lidar image suggests the outline of trees and a vehicle hood, but it does not indicate depth or distance. Credit: Southwest Research Institute")
Southwest Research Institute ha desarrollado herramientas de conducción autónoma todoterreno con un enfoque en el sigilo para los militares y la agilidad para los clientes espaciales y agrícolas.El sistema basado en visión combina cámaras estéreo con algoritmos novedosos, eliminando la necesidad de sensores lidar y activos.
"Reflexionamos sobre los desafíos más difíciles de la visión artificial y luego nos concentramos en lograr un modelado denso y robusto para la navegación todoterreno", dijo Abe Garza, ingeniero de investigación de la División de Sistemas Inteligentes de SwRI.
A través de una investigación interna, los ingenieros de SwRI desarrollaron un conjunto de herramientas conocido como Visión para la autonomía todoterreno (VORA).El sistema pasivo puede percibir objetos, modelar entornos y, simultáneamente, localizar y mapear mientras navega por entornos todoterreno.
El equipo de VORA imaginó un sistema de cámara como una alternativa de detección pasiva al lidar, un sensor de alcance y detección de luz que emite láseres activos para sondear objetos y calcular la profundidad y la distancia.Aunque son muy fiables, los sensores lidar producen luz que las fuerzas hostiles pueden detectar.También es detectable un radar que emite ondas de radio.La navegación GPS puede verse bloqueada y sus señales a menudo quedan bloqueadas en cañones y montañas, lo que puede limitar la automatización agrícola.
"Para nuestros clientes de defensa, queríamos desarrollar mejores capacidades de detección pasiva, pero descubrimos que estas nuevas herramientas de visión por computadora podrían beneficiar a la agricultura yinvestigación espacial", dijo Meera Towler, subgerente del programa SwRI que dirigió el proyecto.
Los investigadores desarrollaron la tecnología VORA para explorar superficies planetarias.En las aplicaciones espaciales, los robots autónomos están limitados por la potencia, la capacidad de carga útil y la conectividad intermitente.En el espacio, las cámaras tienen más sentido que los sistemas lidar que consumen mucha energía.
 data and wheel encoder information to produce highly accurate mapping and localization data, similar to those produced by lidar sensors. The factor graph fused visual odometry—a technique for estimating vehicle motion from a sequence of camera images—with the IMU data to develop key points and pose estimation, which enable automated vehicles to navigate off-road courses. Credit: Southwest Research Institute")
Para superar varios desafíos, el equipo desarrolló un nuevo software para utilizar datos de cámaras estéreo para tareas de alta precisión que tradicionalmente se realizan mediante lidar.Estas tareas incluyen localización, percepción, mapeo y modelado mundial.
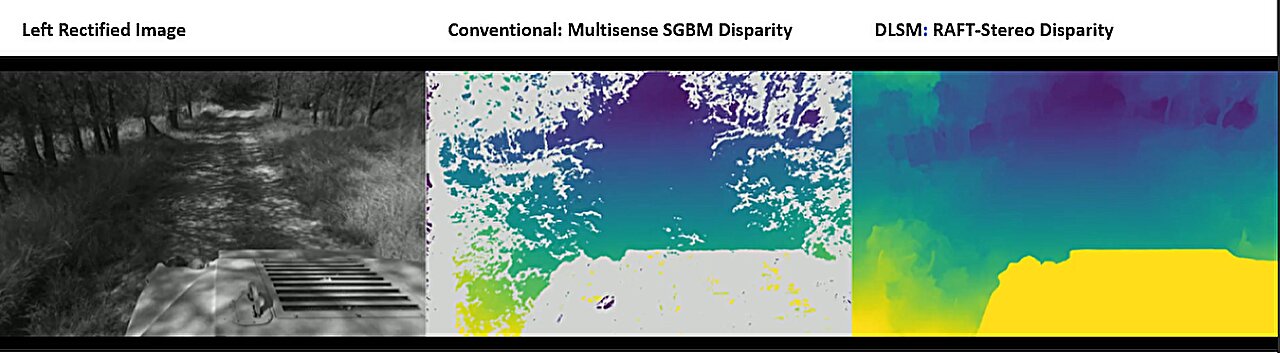
Con base en esta investigación, SwRI desarrolló una herramienta de comparación estéreo de aprendizaje profundo (DLSM), que utiliza una red neuronal recurrente para crear mapas de disparidad densos y precisos a partir de visión estéreo.Un mapa de disparidad resalta las diferencias de movimiento entre dos imágenes estéreo.
Para ayudar en la localización y el mapeo simultáneos, SwRI desarrolló un algoritmo de gráfico de factores para combinar de manera inteligente datos dispersos de características de imágenes estéreo, puntos de referencia, lecturas de unidades de medición inercial (IMU) y codificadores de ruedas para producir datos de localización altamente precisos.Los sistemas autónomos utilizan gráficos de factores, o modelos gráficos probabilísticos, para hacer inferencias comparando variables.
"Aplicamos nuestra investigación sobre la autonomía al ámbito militar yvehículos comerciales, aplicaciones agrícolas y mucho más", dijo Towler. "Estamos entusiasmados de mostrarles a nuestros clientes una solución de cámara estéreo plug-and-play integrada en una pila de autonomía líder en la industria".
SwRI planea integrar la tecnología VORA en otros sistemas autónomos y probarla en un circuito todoterreno en el campus de SwRI en San Antonio.
SwRI ha hecho de la seguridad una prioridad en el desarrollo de vehículos autónomos y sistemas de conducción automatizados a medida que la tecnología alcanza niveles avanzados de preparación para uso comercial y gubernamental.
Citación:Herramientas de conducción autónoma todoterreno centradas en la visión de la cámara (2024, 12 de marzo)recuperado el 12 de marzo de 2024de https://techxplore.com/news/2024-03-road-autonomous-tools-focused-camera.html
Este documento está sujeto a derechos de autor.Aparte de cualquier trato justo con fines de estudio o investigación privados, noparte puede ser reproducida sin el permiso por escrito.El contenido se proporciona únicamente con fines informativos.