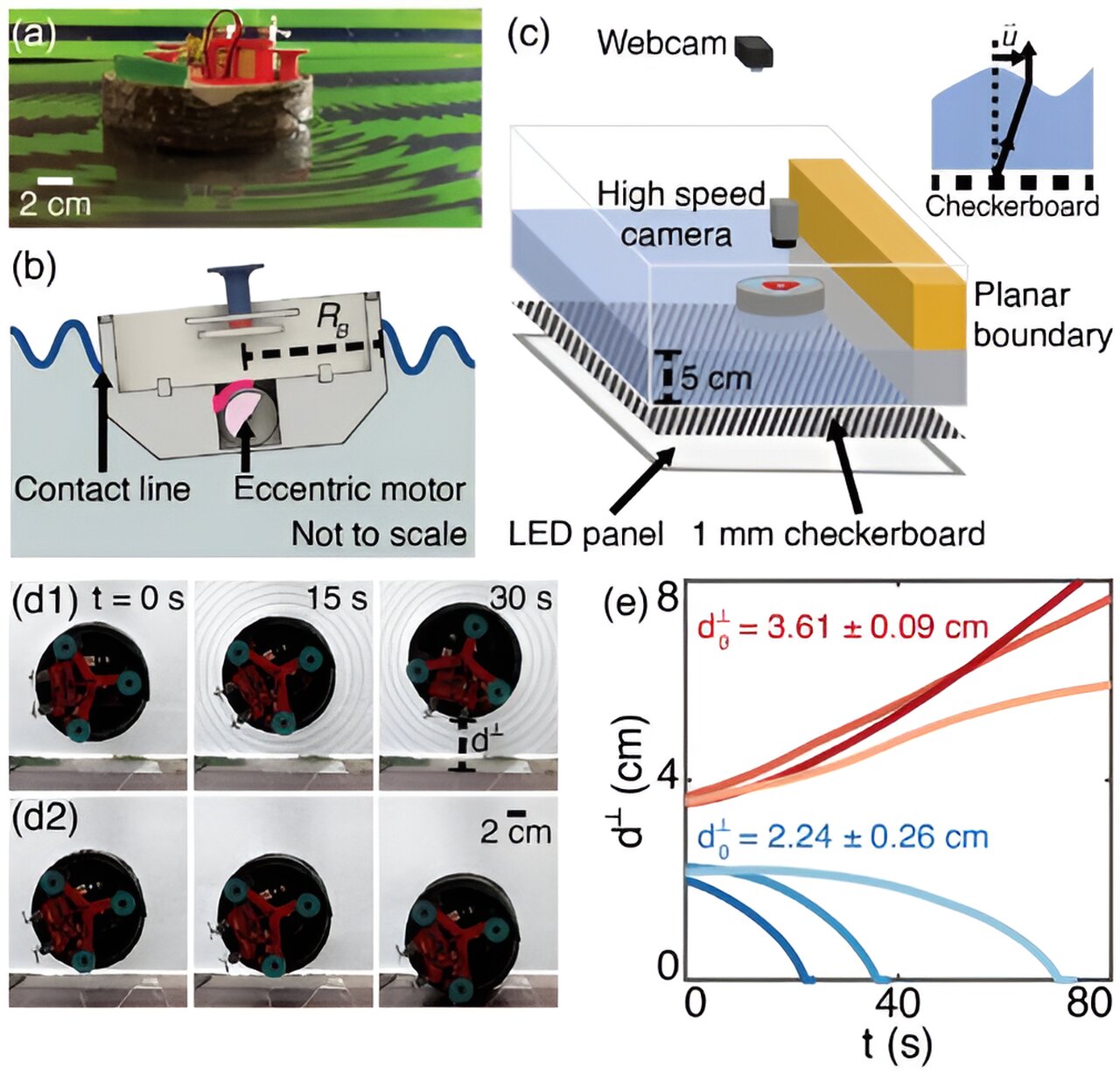
 Photo of boat generating 17.1 Hz waves. (b) Schematic of the eccentric motor vibrating the boat to generate waves; propellers shown in (a) are not used in this study and thus omitted in (b). (c) Diagram of the tank wherein all experiments were performed. A backlit checkerboard enables Fast Checkerboard Demodulation for spatiotemporal surface reconstruction. (Inset) Fast Checkerboard Demodulation determines fluid surface height using the instantaneous distortion of a checkerboard by surface perturbations. (d1)–(d2) Time series of repulsion from (17.1 Hz) and attraction toward (33.5 Hz) wall, respectively. (e) Evolution of perpendicular hull-wall distance for repeated repulsive and attractive trials at 17.1 Hz and two different initial distances. Credit: Physical Review Letters (2024). DOI: 10.1103/PhysRevLett.132.084001")
Pueden suceder cosas extrañas cuando una onda encuentra un límite.En el océano, las olas de un tsunami que apenas se notan en aguas profundas pueden llegar a ser bastante grandes en la plataforma continental y la costa, a medida que las olas disminuyen y su masa se mueve hacia arriba.
El efecto Casimir es la atracción de dos placas paralelas sin carga porque las ondas virtuales de la mecánica cuántica con longitudes de onda mayores que la separación de las placas quedan excluidas entre ellas, por lo que los campos virtuales fuera de las placas las empujan hacia adentro.Placas paralelas parcialmente sumergidas en agua.atraerse unos a otrosya que las ondas de agua portadoras de impulso de longitud de onda más larga están excluidas de la región central.(Las especulaciones sobre un efecto Casimir marítimo entre barcos atracados sontodavía bajo debate.)
Ahora los científicos han demostrado que un robot flotante y oscilante simétrico experimentará fuerzas cuando se acerque a un límite.Estas fuerzas se pueden utilizar para la autopropulsión sin necesidad de mecanismos más típicos como una hélice.
El estudio espublicadoen el diarioCartas de revisión física.
Dirigido por Ph.D.Steven W. Tarr, estudiante del Instituto de Tecnología de Georgia, el equipo construyó un flotador circular impreso en 3D de 12 cm de diámetro y una masa de 368 g.A bordo, colocaron motores que funcionan con baterías que hacen vibrar elbotecon una frecuencia controlable, produciendo un movimiento vibratorio a lo largo del eje longitudinal (giro).Cuando se encendió, la nave produjo una serie de ondas simétricas en la superficie del agua, todas de la misma longitud de onda, que irradiaban desde ella.
Se colocó una lámina acrílica cerca del agua para que actuara como límite, lo suficientemente larga como para crear efectivamente un sistema unidimensional, por lo que solo era necesario monitorear el movimiento del barco perpendicular a la pared.Lejos de la pared (en relación con el tamaño del barco y las longitudes de onda de las olas del agua), no había fuerza neta sobre el barco.Pero cerca de la pared, se observó que el barco generador de olas experimentaba un comportamiento atractivo o repulsivo, dependiendo de su distancia inicial de la pared y de la frecuencia de las ondas de agua que se generaban.
Los investigadores utilizaron una cámara web para registrar el movimiento del barco y midieron su movimiento lateral (perpendicular a la pared), al mismo tiempo que midieron su aceleración en esta dirección perpendicular (que era menos de 100 micrómetros por segundo al cuadrado).Las olas que emanaban del barco oscilante se observaron y midieron con una cámara de alta velocidad mediante fotografía Schlieren, que mide los cambios en el caudal de un fluido observando cambios en su índice de refracción.
Cuando comenzó cerca de la pared (aproximadamente la mitad de su radio o menos), el barco se sintió cada vez más atraído por la pared a medida que su distancia inicial disminuía y su frecuencia de oscilación aumentaba (y, por tanto, también lo hacía la frecuencia de las ondas del agua).En un rango medio, a una distancia inicial de aproximadamente dos tercios de un radio y en frecuencias más bajas, la fuerza sobre el barco se volvió ligeramente repulsiva, alejándolo de la pared.A grandes distancias (en relación con el radio), no había fuerza neta sobre el barco.
Debido a que la aceleración fue bastante pequeña, menos de 10 millonésimas de la superficie de la Tierra.aceleración gravitacional("g"), se tomaron medidas para aislar las fuerzas de los efectos a corto plazo de la viscosidad, el arrastre del barco debido a las propias olas y la inercia del barco.Aun así, las fuerzas eran pequeñas, por debajo de los 100 micronewtons.
El fenómeno locomotor de autopropagación y fuerza neta de las olas que emanaban del barco se produjo cuando las ondas reflejadas en la pared golpearon el casco del barco con suficiente energía.En el lado de la pared del barco, las olas reflejadas golpean el casco con una altura de ola (amplitud) menor que la que dejaron, debido a la dispersión de las olas a medida que viajan a través de la superficie del agua.Estas ondas más pequeñas que regresaban se restaron de las ondas más grandes emitidas, interfiriendo y disminuyendo efectivamente la amplitud de las ondas que el barco emitía en el lado de la pared.
En efecto, el barco emitía ondas asimétricas, más grandes en dirección opuesta a la pared y más pequeñas hacia la pared.Esta asimetría entre los dos lados del barco resultó en una fuerza de atracción hacia la pared.
Más lejos de la pared, las ondas reflejadas tenían una altura demasiado pequeña para afectar la generación neta de ondas, pero aún tenían algo de impulso, lo que resultaba en una ligera fuerza repulsiva.Lejos de la pared, las ondas reflejadas se habían disipado por lo que no proporcionaban ninguna fuerza significativa.
La dependencia de la frecuencia surgió porque, si bien la energía de la onda reflejada aumentaba con la frecuencia, el contacto de las ondas emitidas con la pared conducía a una dinámica complicada en la línea de contacto, disipando una energía sustancial y modificando la amplitud de las ondas reflejadas.
"Nuestro estudio es un excelente ejemplo de la riqueza de fenómenos que esperan ser descubiertos en la interfaz de la física y la robótica", dijo Daniel Goldman, coautor y profesor de física en el Instituto de Tecnología de Georgia, quien llama a este campo "robofísica"."
"Hacer y utilizar analogías de otras ramas de la física (en este caso, el efecto Casimir enteoría cuántica de campos) puede ser útil para desarrollar nuevos enfoques para el movimiento de robots análogos a nuestrotrabajo anteriorsobre la 'difracción mecánica' en sistemas ondulatorios sin extremidades", concluyó Goldman.
Más información:Steven W. Tarr et al, Sondeo de fuerzas inducidas por fluctuaciones hidrodinámicas con un robot oscilante,Cartas de revisión física(2024).DOI: 10.1103/PhysRevLett.132.084001
© 2024 Red Ciencia X
Citación:Un robot oscilante puede impulsarse mediante el reflejo de las ondas del agua (9 de marzo de 2024)recuperado el 9 de marzo de 2024de https://techxplore.com/news/2024-03-oscillating-robot-propel.html
Este documento está sujeto a derechos de autor.Aparte de cualquier trato justo con fines de estudio o investigación privados, noparte puede ser reproducida sin el permiso por escrito.El contenido se proporciona únicamente con fines informativos.