
En los últimos años, los científicos e ingenieros de materiales han introducido materiales cada vez más sofisticados para aplicaciones robóticas y protésicas.Esto incluye una amplia gama de pieles electrónicas, o e-skins, diseñadas para detectar el entorno y reproducir artificialmente el sentido del tacto.
Investigadores de la Universidad de Tsinghua introdujeron recientemente una nueva piel electrónica táctil de doble modo que podría mejorar las capacidades de detección de los robots y, al mismo tiempo, permitirles comunicar información aprovechando el sentido del tacto de un usuario humano.Esta e-skin, presentada enun papelpublicado en el servidor de preimpresiónarXivy aceptado porIEEE ICRA 2024, puede sentir información táctil y producirretroalimentación táctil, permitiendo así interacciones bidireccionales entre humanos y robots (HRI) basadas en el tacto.
"Nuestro artículo presenta una piel electrónica de modo dual (e-skin) diseñada para mejorarinteracción persona-computadora(HRI)", dijo a Tech Xplore el Dr. Wenbo Ding, coautor del artículo. "Aborda las limitaciones de la tecnología electrónica actual de la piel, que sólo puede proporcionartáctil percepciónotáctil comentario, pero no ambos.Los mecanismos de trabajo de las unidades de detección y retroalimentación no se pueden combinar perfectamente, lo que resulta en dispositivos más grandes y mayores costos de fabricación."
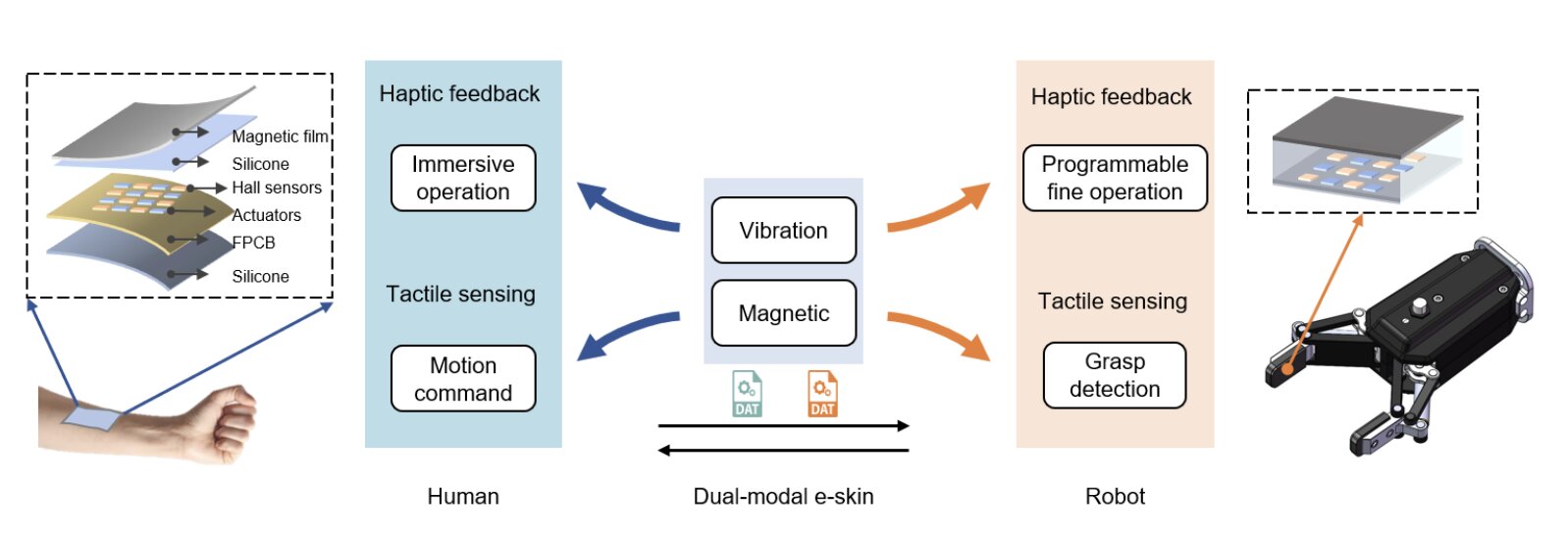
El objetivo principal del reciente estudio del Dr. Ding y sus colegas fue desarrollar una piel electrónica de doble modo que también respondiera a las fuerzas de contacto, mediante la transmisión bidireccional de información táctil.Para lograr esto, la piel electrónica que introdujeron integra detección táctil magnética multimodal con retroalimentación de vibración.

"La e-skin integra una película magnética flexible, un elastómero de silicio, un conjunto de sensores Hall, un conjunto de actuadores y una unidad de microcontrolador", explicó el Dr. Ding."El sensor Hall detecta la deformación de la película magnética causada por la presión mecánica, lo que provoca cambios en lacampo magnético, logrando así una percepción táctil multidimensional.Al mismo tiempo, el conjunto de actuadores genera vibración mecánica para proporcionar retroalimentación táctil, mejorando la experiencia interactiva entre humanos y robots".
El Dr. Ding y sus colegas probaron un prototipo de su piel electrónica en una serie de experimentos, explorando también su potencial para tres posibles aplicaciones principales: reconocimiento de objetos, pesaje preciso y HRI inmersivo.Descubrieron que la piel electrónica era eficaz tanto para detectar información táctil como para producir retroalimentación táctil.
"El experimento de pesaje es particularmente innovador, ya que emplea vibraciones táctiles de formas inesperadas y creativas", afirmó el Dr. Ding."Además, se puede controlar la velocidad del delicado proceso de pesaje y se puede mejorar la precisión del control a (~0,0246 g), satisfaciendo los requisitos diarios de pesaje industrial y de cocina. El coste total del dispositivo es inferior a 26 dólares y pesa menos de29 gramos."
La piel electrónica táctil de doble modo presentada por el Dr. Ding y sus colegas pronto podría implementarse y probarse en una variedad de entornos.Entre otras cosas, podría avanzar en la manipulación robótica, permitir máscontrol precisoen robots industriales y abrir nuevas rutas para el desarrollo de prótesis sofisticadas.
"Nuestra investigación y desarrollo futuros se centrarán en miniaturizarpiel electrónicacomponentes para una gama más amplia de aplicaciones, incorporando nuevas modalidades de detección (por ejemplo, detección de temperatura) y añadiendo retroalimentación auditiva", añadió el Dr. Ding. "Estos avances tienen como objetivo proporcionar una experiencia sensorial más completa y mejorar la colaboración entre humanos y máquinas".
Más información:Shilong Mu et al, E-skin táctil de doble modo: habilitación de la interacción bidireccional entre humanos y robots mediante percepción y retroalimentación táctil integradas,arXiv(2024).DOI: 10.48550/arxiv.2402.05725
Información de la revista: arXiv
© 2024 Red Ciencia X
Citación:Una piel electrónica que puede detectar información táctil y producir retroalimentación táctil (7 de marzo de 2024)recuperado el 7 de marzo de 2024de https://techxplore.com/news/2024-03-skin-tactile-feedback.html
Este documento está sujeto a derechos de autor.Aparte de cualquier trato justo con fines de estudio o investigación privados, noparte puede ser reproducida sin el permiso por escrito.El contenido se proporciona únicamente con fines informativos.