
en unestudiarpublicado enIngeniería, un equipo colaborativo de investigadores de la Universidad de Shanghai y expertos internacionales han revelado un enfoque de vanguardia para optimizar las rutas y cronogramas de inspección de vehículos aéreos no tripulados (UAV) para proyectos de ingeniería.
La investigación, dirigida por Lu Zhen, Zhiyuan Yang, Gilbert Laporte, Wen Yi y Tianyi Fan, presenta un innovador modelo de programación lineal entera mixta (MILP) combinado con un algoritmo de búsqueda de vecindad variable (VNS), construyendo un nuevo enfoque en elcampo de la gestión de ingeniería.
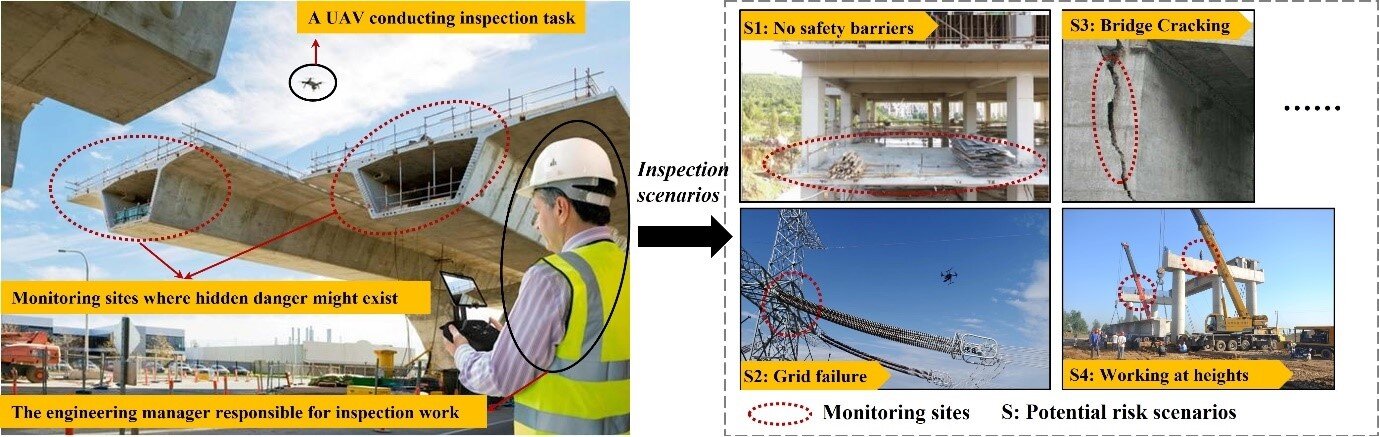
El rápido desarrollo y adopción de la tecnología UAV ha abierto nuevos horizontes para diversas industrias, particularmente en la ingeniería, donde la necesidad de métodos de inspección eficientes, seguros y rentables está siempre presente.Las técnicas de inspección tradicionales, a menudo manuales y plagadas de riesgos, no logran abordar las complejidades y los peligros asociados con los proyectos de ingeniería a gran escala.
La investigación del equipo proporciona una solución sofisticada a este desafío, aprovechando la agilidad y precisión de los UAV para realizar inspecciones en una fracción del tiempo y con un riesgo significativamente reducido para los inspectores humanos.
El corazón de esta innovación radica en el diseño meticuloso del modelo MILP y el algoritmo VNS, que juntos navegan por las intrincadas limitaciones de las operaciones de vehículos aéreos no tripulados, como la capacidad limitada de la batería y las zonas reglamentarias de exclusión aérea.Este marco de optimización avanzado no sólo garantiza una cobertura integral deinspecciónáreas sino que también se adapta dinámicamente a las condiciones del lugar, maximizando la eficiencia y la seguridad.
Destacando la aplicación práctica de su investigación, el equipo realizó unestudio de casosobre el proyecto del puente Shiziyang.Los resultados demostraron la notable capacidad del modelo para optimizar el enrutamiento y la programación de vehículos aéreos no tripulados, identificando riesgos potenciales y problemas estructurales en poco tiempo.Esta aplicación del mundo real subraya el potencial del modelo para transformar la ingeniería.practicas de gestion, que ofrece una visión del futuro de las inspecciones de ingeniería.
A medida que la industria global de la ingeniería continúa creciendo y evolucionando, la demanda de soluciones innovadoras como las inspecciones basadas en vehículos aéreos no tripulados no hará más que aumentar.Esta investigación no solo satisface esta demanda sino que también ofrece un marco escalable, adaptable y sólido para aprovechar la tecnología para mejorar la seguridad y la eficiencia.
El artículo de investigación completo, "Rutas y programación de inspección de vehículos aéreos no tripulados para la gestión de ingeniería" proporciona una exploración en profundidad de la metodología, los experimentos y las implicaciones más amplias de este avance.Disponible enIngeniería, sirve como un recurso valioso para ingenieros, gerentes de proyectos y formuladores de políticas que buscan aprovechar el poder de la tecnología UAV para prácticas de ingeniería más seguras y eficientes.Este estudio marca un
hito significativoen el campo de la gestión de ingeniería, ofreciendo soluciones prácticas e innovadoras que prometen revolucionar las inspecciones de ingeniería en todo el mundo.Con su combinación de rigor académico y aplicabilidad en el mundo real, la investigación ejemplifica el potencial de la colaboración interdisciplinaria para abordar desafíos complejos, impulsando el progreso y la innovación en la industria de la ingeniería y más allá.
Más información:Lu Zhen et al, Programación y rutas de inspección de vehículos aéreos no tripulados para la gestión de ingeniería,Ingeniería(2024).DOI: 10.1016/j.eng.2023.10.014Proporcionado por
Ingeniería
Citación:Innovación en los cielos: nuevo enfoque para las inspecciones de ingeniería impulsadas por vehículos aéreos no tripulados (6 de marzo de 2024)recuperado el 6 de marzo de 2024de https://techxplore.com/news/2024-03-skies-approach-unmanned-aerial-vehicle.html
Este documento está sujeto a derechos de autor.Aparte de cualquier trato justo con fines de estudio o investigación privados, noparte puede ser reproducida sin el permiso por escrito.El contenido se proporciona únicamente con fines informativos.