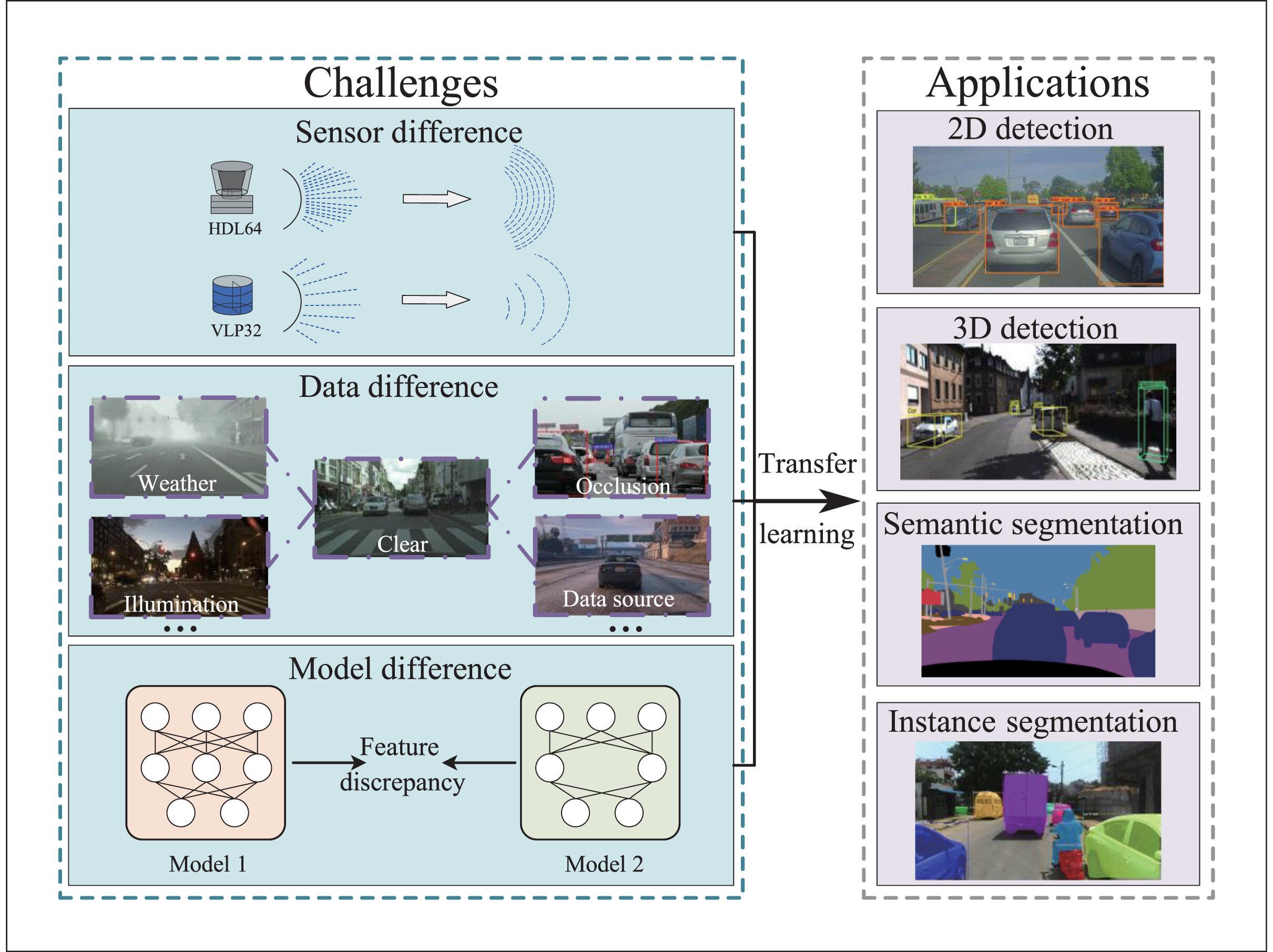
 methods can be applied to reduce the domain gaps by sensor difference, data difference, and model difference. Credit: Green Energy and Intelligent Transportation")
Un grupo internacional de científicos ha publicado unpapelen el diarioEnergía verde y transporte inteligente, que resume una revisión exhaustiva del aprendizaje de transferencia profunda para la percepción inteligente de vehículos.
En los últimos años,percepciónSe ha considerado un componente fundamental en los vehículos inteligentes para una localización precisa, una planificación de movimiento segura y un control sólido.El sistema de percepción proporciona a los vehículos inteligentes información ambiental inmediata sobre los peatones, vehículos, señales de tráfico y otros elementos circundantes y ayuda a evitar posibles colisiones.
La percepción inteligente de vehículos basada en el aprendizaje profundo se ha desarrollado de manera destacada para proporcionar una fuente confiable para la planificación del movimiento y la toma de decisiones enconducción autónoma.Muchos métodos potentes basados en el aprendizaje profundo pueden lograr un rendimiento excelente al resolver diversos problemas de percepción de la conducción autónoma.
Sin embargo, estos métodos de aprendizaje profundo todavía tienen varias limitaciones;por ejemplo, la suposición de que los datos de capacitación en laboratorio (dominio de origen) y de pruebas reales (dominio de destino) siguen la misma distribución de características puede no ser práctica en el mundo real.A menudo existe una brecha de dominio dramática entre ellos en muchos casos del mundo real.
Como solución a este desafío, el aprendizaje por transferencia profunda puede manejar situaciones de manera excelente transfiriendo conocimientos de un dominio a otro.El aprendizaje por transferencia profunda tiene como objetivo mejorar el desempeño de las tareas en un nuevo dominio aprovechando el conocimiento de tareas similares aprendidas previamente en otro dominio.
Actualmente no existen estudios sobre el tema del aprendizaje por transferencia profunda para la percepción inteligente de vehículos.Este nuevo artículo de encuesta tiene como objetivo hacer contribuciones para presentar y explicar las técnicas de aprendizaje de transferencia profunda para la percepción inteligente de vehículos, ofreciendo conocimientos y direcciones invaluables para futuras investigaciones.
Para los vehículos inteligentes o la conducción autónoma, la percepción juega un papel crucial al recibir datos de los sensores y extraer información significativa del entorno circundante, a fin de tomar decisiones significativas para una planificación precisa del movimiento mediante la identificación de obstáculos.señales de tráfico/marcadores y áreas de conducción disponibles.Los investigadores agruparon estas tareas de percepción inteligente de vehículos en dos clases (detección de objetos, segmentación semántica/de instancias).
A pesar de los notables logros de los algoritmos inteligentes de percepción de vehículos en conjuntos de datos de referencia, todavía existen desafíos importantes en el mundo real debido a las grandes variaciones en los tipos y configuraciones de sensores, datos de diversos estilos, entornos, clima e iluminación, épocas de entrenamiento yarquitectura.
Con base en estas observaciones, los investigadores dividieron la discrepancia de distribución de dominios para la percepción de vehículos inteligentes en tres tipos: diferencia de sensor, diferencia de datos y diferencia de modelo.
Con el rápido avance de las técnicas de conducción autónoma, ahora hay una gran cantidad de imágenes de escenas de conducción disponibles.Los métodos de aprendizaje profundo están en auge en la aplicación de la conducción autónoma con alta percepción de rendimiento.
El aprendizaje por transferencia (TL) es un método de aprendizaje automático para aplicar en gran medida el conocimiento adquirido en una tarea o dominio a otra tarea o dominio relacionado.Los investigadores clasificaron el aprendizaje de transferencia profunda en varios tipos principales: TL supervisado, TL no supervisado, TL débil y semisupervisado y generalización de dominio.
Más información:Xinyu Liu et al, Aprendizaje de transferencia profunda para la percepción inteligente de vehículos: una encuesta,Energía verde y transporte inteligente(2023).DOI: 10.1016/j.geits.2023.100125
Proporcionado porEnergía verde y transporte inteligente
Citación:Primera encuesta en profundidad sobre el tema del aprendizaje de transferencia profunda para la percepción inteligente de vehículos (2 de febrero de 2024)recuperado el 2 de febrero de 2024de https://techxplore.com/news/2024-02- Depth-survey-topic-deep-intelligent.html
Este documento está sujeto a derechos de autor.Aparte de cualquier trato justo con fines de estudio o investigación privados, noparte puede ser reproducida sin el permiso por escrito.El contenido se proporciona únicamente con fines informativos.