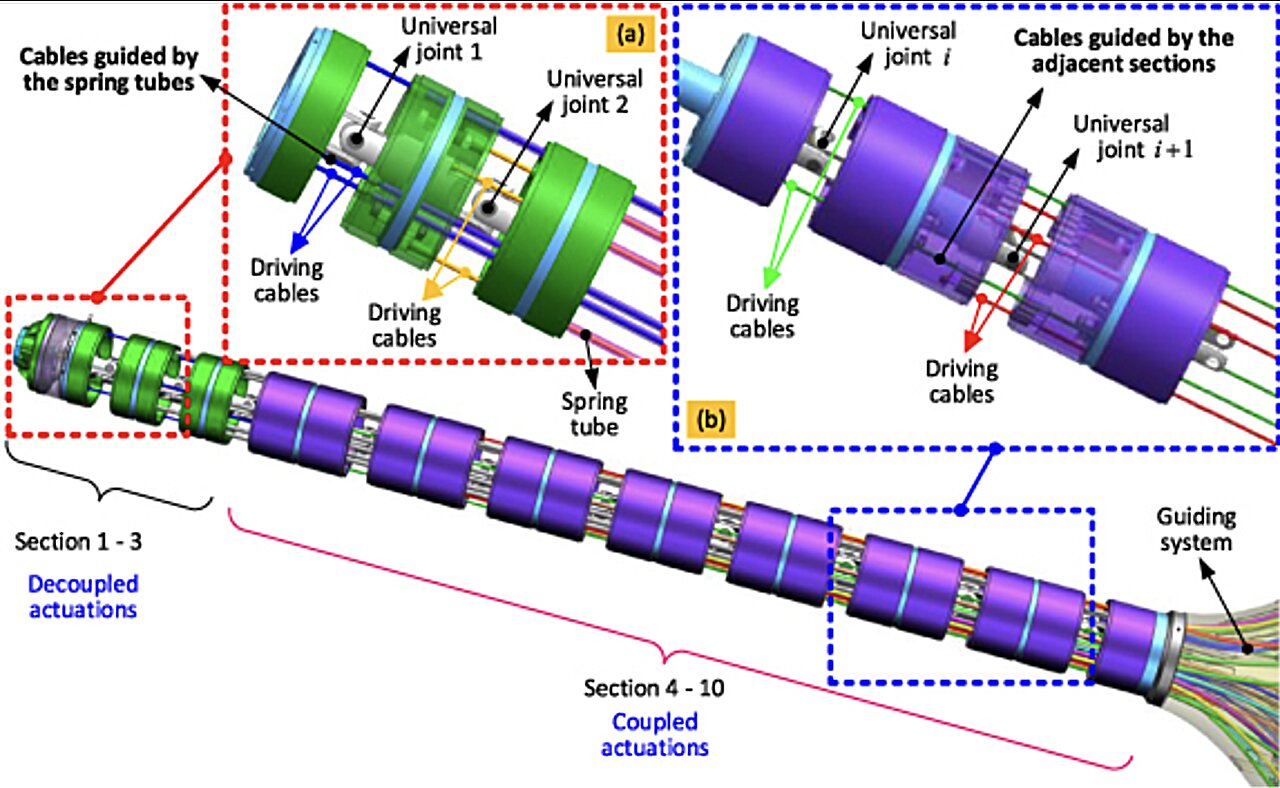
 shows the three tip sections with decoupled actuation; (b) shows the seven base sections with coupled actuation. Credit: Ma et al")
Los sistemas robóticos inspirados en la naturaleza pueden ayudar a abordar de manera eficiente una amplia gama de problemas, desde navegar en entornos complejos hasta completar misiones sin problemas en equipo.En los últimos años, los robóticos han creado un número creciente de sistemas bioinspirados diseñados para replicar la estructura corporal y los movimientos de varios animales, incluidas las serpientes.
Los robots con forma de serpiente podrían tener varias ventajas sobre otros sistemas con estructuras corporales más convencionales.Debido a su cuerpo flexible y sus movimientos deslizantes, podrían llegar a áreas pequeñas y confinadas a las que de otro modo sería difícil acceder, por ejemplo, moviéndose dentro de tuberías, minas y en otros entornos desafiantes.
A pesar de su potencial, hasta ahora los robots serpiente no se han implementado con éxito a gran escala.Esto se debe en parte a las dificultades encontradas al intentar modular eficazmente la capacidad de estos sistemas.rigidez, permitiendo realizar los movimientos deseados y alcanzar posiciones objetivo con alta precisión.
Investigadores de la Universidad de Lancaster, el Instituto de Tecnología de Beijing y la Universidad de Tecnología del Norte de China se propusieron recientemente desarrollar una nueva estrategia de diseño que podría ayudar a regular mejor la rigidez de los robots serpiente.Sumétodo propuesto, descrito en la revistaBioinspiración y biomimética, se aplicó al desarrollo de un brazo robótico con forma de serpiente con 20 grados de libertad (DoF).
"Los robots serpiente se han utilizado ampliamente en entornos desafiantes, como espacios confinados", escribieron Nan Ma, Haqin Zhou y sus colegas en su artículo."Sin embargo, la mayoría de los robots serpiente existentes con grandes relaciones longitud/diámetro tienen baja rigidez, y esto limita su precisión y utilidad. Para remediar esto, en este estudio se propone una novedosa estructura 'macro-micro' ayudada por una nueva estrategia integral de regulación de la rigidez.papel."
La macro-microestructura ideada por este equipo de investigación puede mejorar la precisión posicional de los robots con forma de serpiente mientras navegan por espacios confinados, tanto por encima como por debajo del suelo.Esta estructura va acompañada de una estrategia integral recientemente desarrollada para regular larobotLa rigidez, así como un modelo cinetostático diseñado para estimar errores."La fricción interna, la variación de la rigidez del cable en función de la tensión y sus efectos sobre la rigidez estructural del brazo de la serpiente bajo diferentes configuraciones se han incorporado al modelo para aumentar la precisión del modelado", escribieron Ma, Zhou y sus colegas.
"Finalmente, los modelos propuestos fueron validados experimentalmente sobre un prototipo físico y un sistema de control (error: 4,3% y 2,5% para configuraciones rectas y curvas, respectivamente)".
Ma, Zhou y sus colegas utilizaron el diseño propuesto para desarrollar un prototipo de sistema, que luego evaluaron en una serie de pruebas iniciales.Sus hallazgos fueron muy prometedores, ya que su estrategia les permitió ajustar la tensión de los cables que impulsan los movimientos del brazo en forma de serpiente en un promedio de 183,4%.
En el futuro, este estudio reciente podría informar el desarrollo de mejores resultadosserpiente-inspiradosistemas robóticos, que se puede modular con mayor precisión y, por lo tanto, puede completar mejor misiones en entornos complejos y altamente confinados.Estos robots podrían resultar increíblemente valiosos para ayudar a los agentes humanos durante la búsqueda yoperaciones de rescate, para monitorear entornos subterráneos y para muchas otras aplicaciones avanzadas del mundo real.
Más información:Nan Ma et al, Regulación integral de la rigidez en un robot serpiente de múltiples secciones considerando el movimiento del parásito y los efectos de la fricción.Bioinspiración y biomimética(2023).DOI: 10.1088/1748-3190/ad0ffc
© 2023 Red Ciencia X
Citación:Una nueva estrategia para regular la rigidez de los robots inspirados en serpientes (2023, 27 de diciembre)recuperado el 27 de diciembre de 2023de https://techxplore.com/news/2023-12-strategy-stiffness-snake-inspired-robots.html
Este documento está sujeto a derechos de autor.Aparte de cualquier trato justo con fines de estudio o investigación privados, noparte puede ser reproducida sin el permiso por escrito.El contenido se proporciona únicamente con fines informativos.