
Los expertos en robótica llevan varios años intentando desarrollar robots que puedan realizar diversas tareas domésticas cotidianas, como lavar los platos o ordenar.Sin embargo, hasta el momento ninguno de los robots creados ha sido comercializado y adoptado a gran escala.
Investigadores de la Universidad de Nueva York presentaron recientemente Dobb-E, un nuevo marco diseñado específicamente para entrenar eficazmenterobots móvilesen tareas domésticas, contribuyendo en última instancia a su uso generalizado en el futuro.Este marco, descrito en un artículoprepublicadoen el servidorarXiv, podría aplicarse a varios robots diseñados para ayudar a los humanos en sus hogares.
"Este artículo nació de nuestra visión de introducir robots en el hogar estadounidense promedio en un futuro cercano", dijo a Tech Xplore Lerrel Pinto, coautor del artículo."Ya tenemos 'robots' especializados en nuestras casas, como lavavajillas o lavadoras, pero un generalistarobotque puedan aprender cómo completar cada tarea y cómo pueden ayudar mejor en esa situación ha sido una meta lejana durante demasiado tiempo".El reciente trabajo de Pinto y sus colegas tenía una serie de objetivos principales, todos los cuales deberían cumplirse para que los robots se integren con éxito en entornos domésticos.
En primer lugar, el equipo deseaba idear un enfoque eficiente que permitiera a los usuarios enseñar rápidamente a los robots nuevas habilidades.
Este enfoque también debería garantizar la seguridad de los robots, garantizando que no causen ningún daño mientras aprenden a completar nuevas tareas.Por último, no debería ser especialmente exigente para los usuarios finales, garantizando así que simplifique su vida en lugar de complicarla.
"Para lograr eficiencia, confiamos en sistemas de aprendizaje basados en datos, cuyo éxito es fácilmente visible en los modelos de aprendizaje automático más grandes que se implementan en la actualidad", afirmó Pinto."Logramos la seguridad formulando nuestro sistema en torno al aprendizaje con la supervisión del usuario en lugar de aprender mediante prueba y error. Finalmente, desarrollamos una herramienta ergonómica de recopilación de demostraciones, que nos permite recopilar demostraciones de tareas específicas en hogares desconocidos sin la operación directa del robot.".

El marco Dobb-E tiene cuatro componentes clave, a saber, una herramienta de recopilación de datos, un modelo previamente entrenado, una diversaconjunto de datosy un esquema de implementación.El primero de estos componentes, llamado "Stick", está diseñado para simplificar la recopilación de datos, aprovechando el teléfono inteligente del usuario.
"El Stick es nuestra herramienta de recopilación de datos económica pero ergonómica que construimos a partir de una herramienta de agarre, soportes impresos en 3D y un iPhone pro", dijo Pinto."Una simple lista de ingredientes hace que esta herramienta sea accesible y barata, mientras que el iPhone montado nos permite grabar vídeo de alta resolución, información de profundidad y movimiento de las manifestaciones".
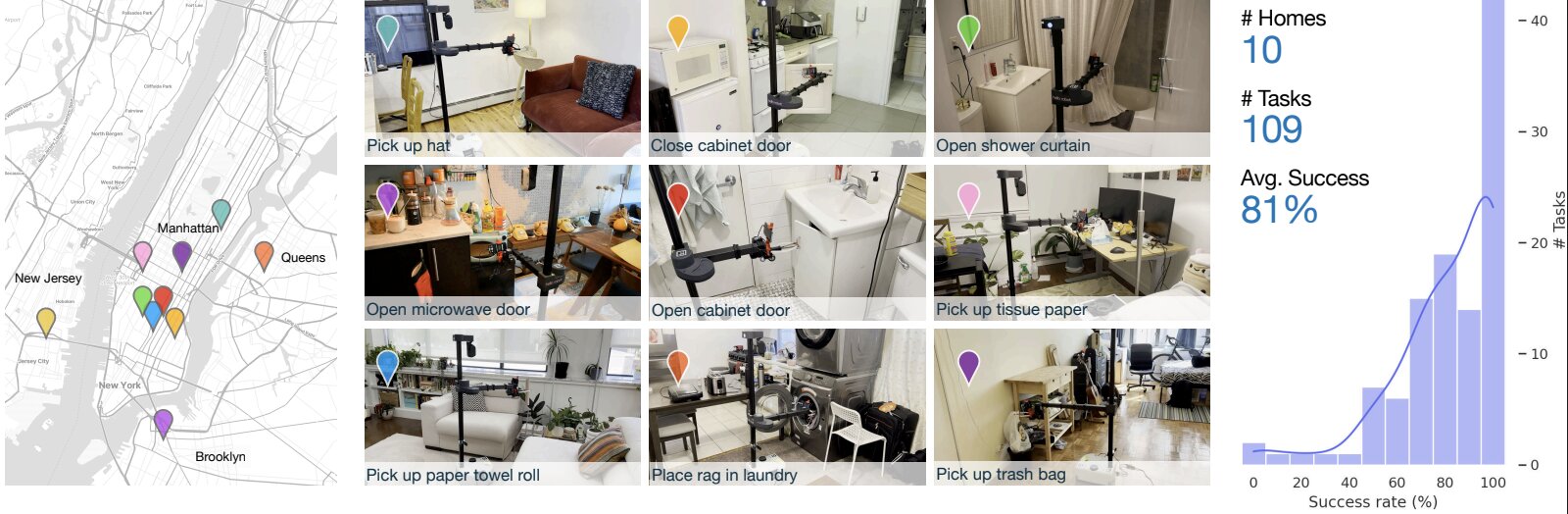
Utilizando la herramienta de recopilación de datos Stick, Pinto y sus colegas compilaron un nuevo conjunto de datos para entrenar robots domésticos, al que llamaron conjunto de datos Homes of New York (HoNY).Este conjunto de datos contiene imágenes recopiladas utilizando su configuración basada en teléfonos inteligentes en 216 entornos domésticos en Nueva York.
A diferencia de otros conjuntos de datos para el entrenamiento de robots desarrollados en el pasado, el conjunto de datos HoNY se centra en un conjunto más diverso de escenas y comportamientos de robots.Además, la herramienta de recopilación Stick les permitió compilar un orden de magnitud más escenas que las presentadas en conjuntos de datos anteriores.
El tercer componente del sistema Dobb-E es un modelo de percepción previamente entrenado.Este modelo se entrenó en el conjunto de datos HoNY, empleando un enfoque de aprendizaje autosupervisado.
"Entrenamos Home Pretrained Representations (HPR) como nuestro modelo de reconocimiento visual utilizando el conjunto de datos HoNY y un algoritmo de aprendizaje autosupervisado de última generación, MoCo-v3", explicó Pinto."HPR permite que nuestro método se adapte a escenas muy diferentes en diferentes hogares".

Pinto y sus colegas evaluaron el potencial de su herramienta de recopilación de datos, el conjunto de datos HoNY y el modelo de reconocimiento visual previamente entrenado en una serie de experimentos en entornos domésticos reales.En estos experimentos, implementaron su algoritmo entrenado en elHola robot estiramiento, un prometedor robot doméstico móvil multifunción.
Sorprendentemente, al robot se le enseñó a realizar 109 tareas domésticas diferentes.Para cada una de estas tareas, los investigadores ajustaron su modelo con cinco minutos de nuevos datos de video en promedio.
"El resultado más interesante de este artículo es la confirmación de que con nuestro nivel actual de tecnología podemos construir agentes robóticos aprendidos que pueden abordar una amplia gama de tareas en una gama igualmente amplia de hogares", dijo Pinto.
"Dobb-E es un proyecto de investigación de vanguardia, pero al ampliarlo y construir un andamiaje adecuado a su alrededor, podemos esperar que se convierta en los primeros pasos hacia un asistente general en el hogar que pueda ayudar a las personas mayores y a las personas afectadas por discapacidades., o simplemente padres ocupados. Sin embargo, llegar allí desde donde estamos necesita mucho más trabajo tanto para mejorar las capacidades como [pulir] para hacerlo más fácil de usar".
El marco Dobb-E es una gran contribución a los esfuerzos en curso destinados a permitir el despliegue generalizado de robots domésticos multifunción.Los experimentos iniciales del equipo arrojaron resultados muy prometedores, al tiempo que destacaron algunos de los factores clave que afectan el rendimiento de los robots domésticos.
En el futuro, este trabajo reciente podría contribuir al desarrollo de sistemas de robots domésticos cada vez más avanzados.Pinto y sus colegas han publicado públicamente su herramienta de recopilación de datos, su conjunto de datos y su modelo previamente entrenado, por lo que otros equipos de investigación pronto podrían utilizarlos o adaptarlos como parte de sus propios estudios.
"Si bien Dobb-E aborda el aprendizaje de habilidades de bajo nivel en una variedad de escenarios diferentes, no aborda la necesidad de un planificador o política de nivel superior que vincule estas habilidades para realizar una variedad de tareas en los hogares", añadió Pinto.
"Una de nuestras direcciones futuras debería ser buscar encadenar habilidades para completar tareas significativas y de largo horizonte en los hogares. Otra dirección que queremos investigar es mejorar los sensores del Stick y el robot, y potencialmente iterar en nuestra detección de profundidad., agregando más vistas de cámara y agregando más modalidades de sensores como el tacto y los sonidos".
Más información:Nur Muhammad Mahi Shafiullah et al, Sobre traer robots a casa,arXiv(2023).DOI: 10.48550/arxiv.2311.16098
Información de la revista: arXiv
© 2023 Red Ciencia X
Citación:Dobb-E: Un marco para entrenar robots polivalentes para uso doméstico (2023, 18 de diciembre)recuperado el 18 de diciembre de 2023de https://techxplore.com/news/2023-12-dobb-e-framework-multi-skilled-robots-domestic.html
Este documento está sujeto a derechos de autor.Aparte de cualquier trato justo con fines de estudio o investigación privados, noparte puede ser reproducida sin el permiso por escrito.El contenido se proporciona únicamente con fines informativos.