2020-02-14 14:52:48
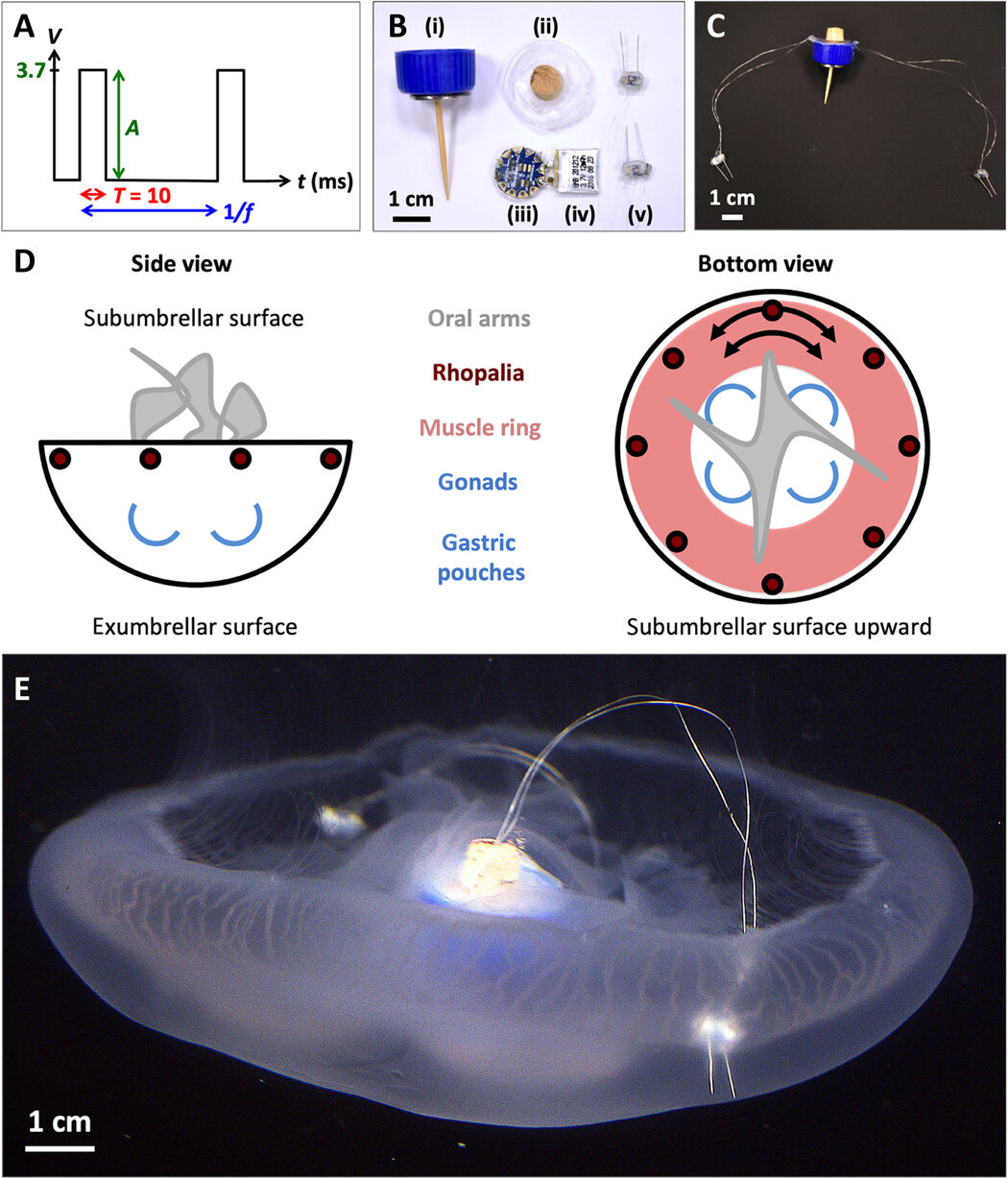
Researchers in robotic materials aim to artificially control animal locomotion to address the existing challenges to actuation, control and power requirements in soft robotics. In a new report in Science Advances, Nicole W. Xu and John O. Dabiri at the departments of bioengineering, civil and environmental engineering and mechanical engineering at the Stanford University presented a biohybrid robot that used onboard microelectronics to induce swimming in live jellyfish. They measured the ability to substantially enhance propulsion by driving body contractions at an optimal frequency range faster than natural behavior. The manoeuvre increased swimming speed by nearly threefold, although with only a twofold increase in metabolic expenditure of the animal and 10 mW of external power input to the microelectronics. The biohybrid robot used 10 to 1000 times less external power per mass than with previously reported aquatic robots. The capability can improve the performance scope of biohybrid robots relative to native performance, with potential applications as biohybrid ocean monitoring robots.